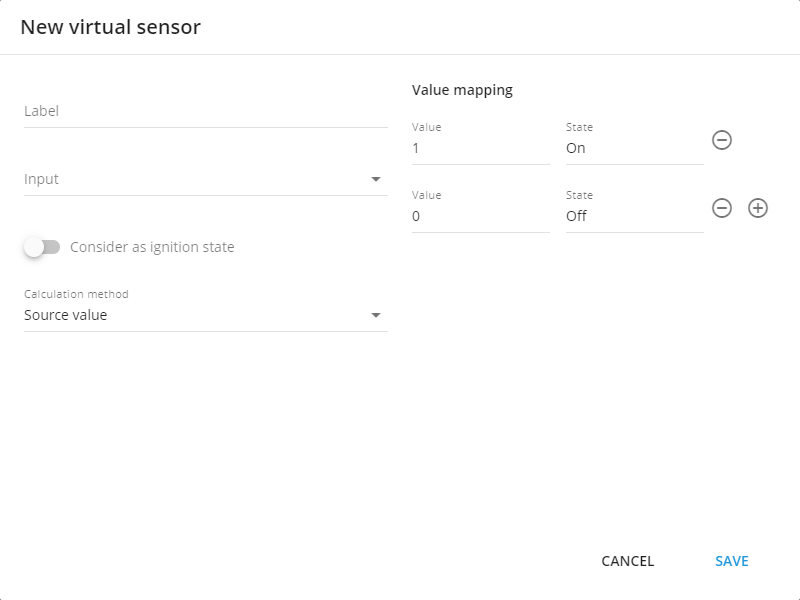
Antarmuka sensor virtual
Antarmuka sensor virtual
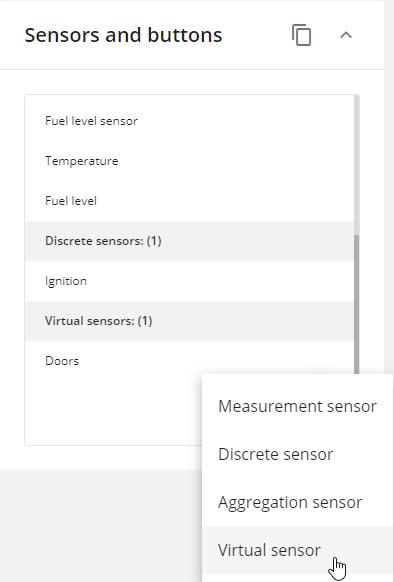
Penambahan sensor virtual pada sensor dan tombol
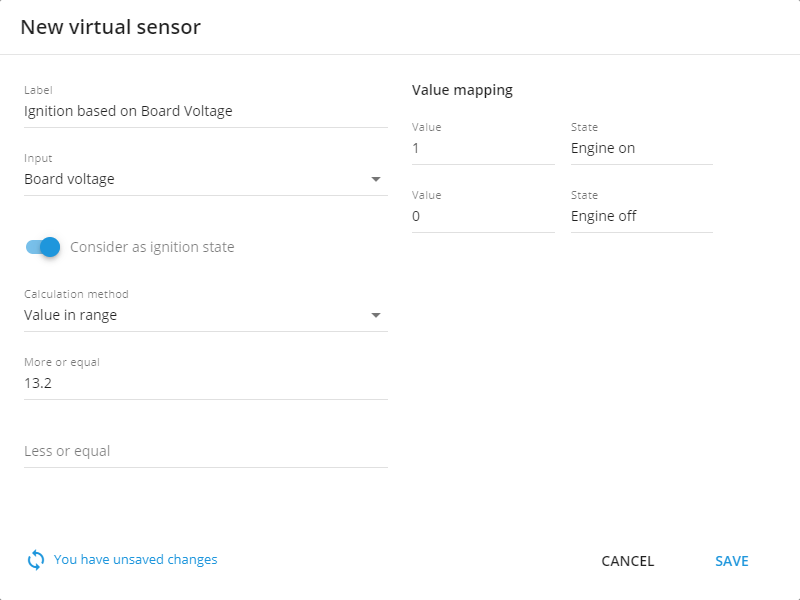
Contoh konfigurasi untuk ignition virtual
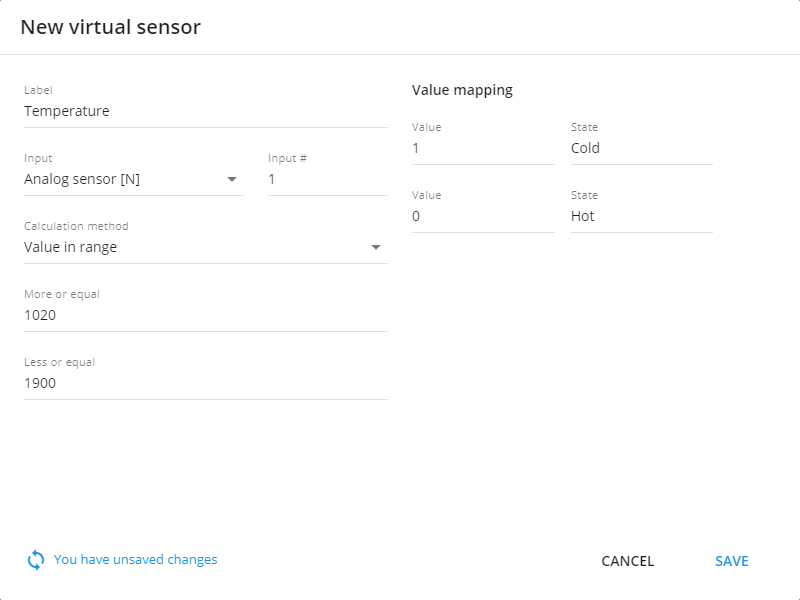
Contoh konfigurasi untuk membaca suhu dari sensor analog
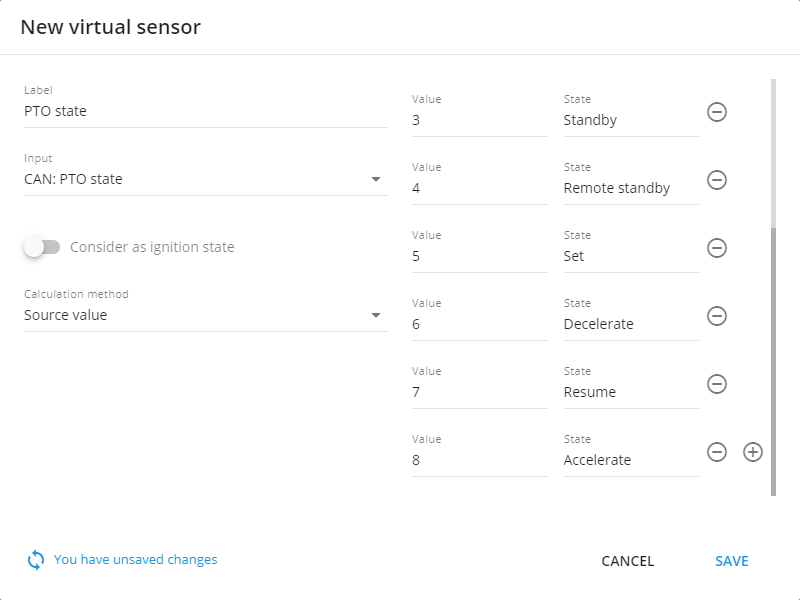
Contoh konfigurasi untuk metode perhitungan nilai sumber
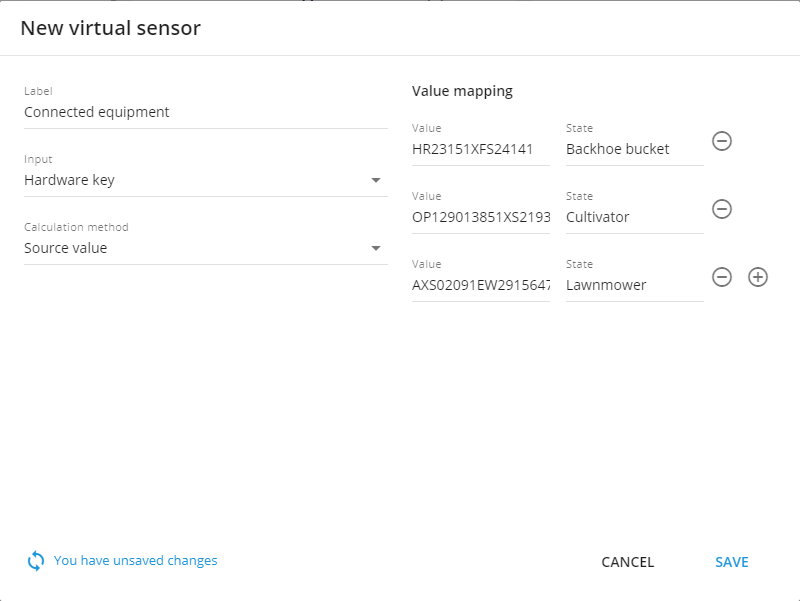
Contoh konfigurasi untuk metode perhitungan nilai sumber untuk pembacaan sensor kunci perangkat keras atau bidang status
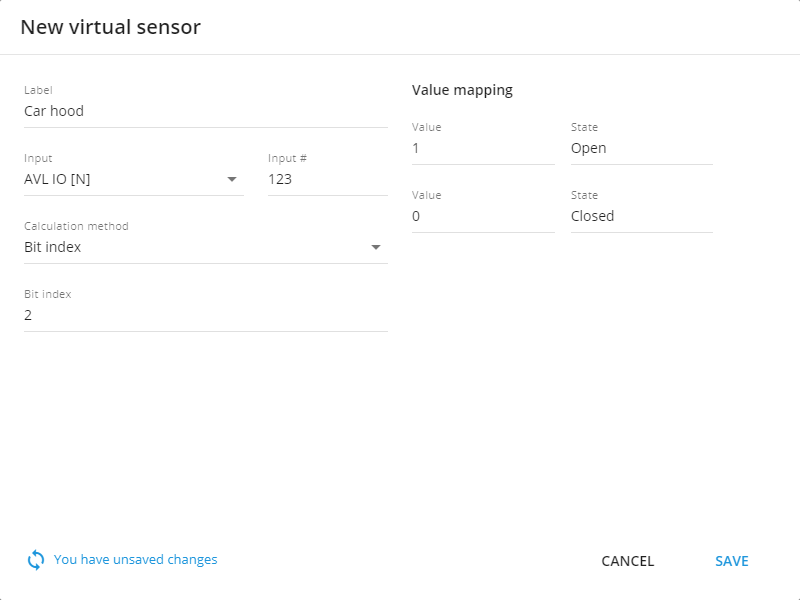
Contoh konfigurasi untuk sensor metode perhitungan Indeks bit