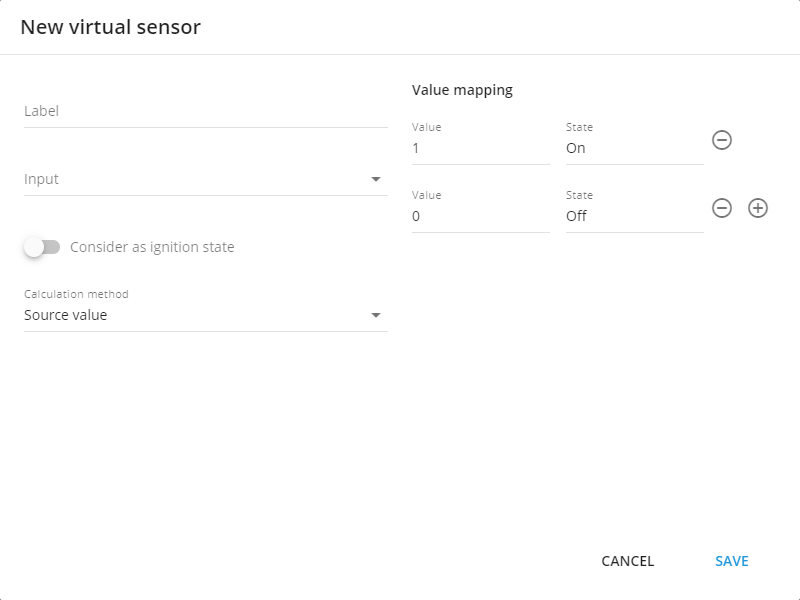
Interface de sensor virtual
Interface de sensor virtual
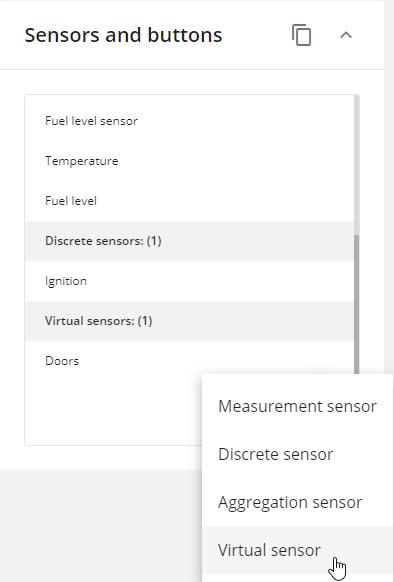
Adição de sensor virtual em Sensores e botões
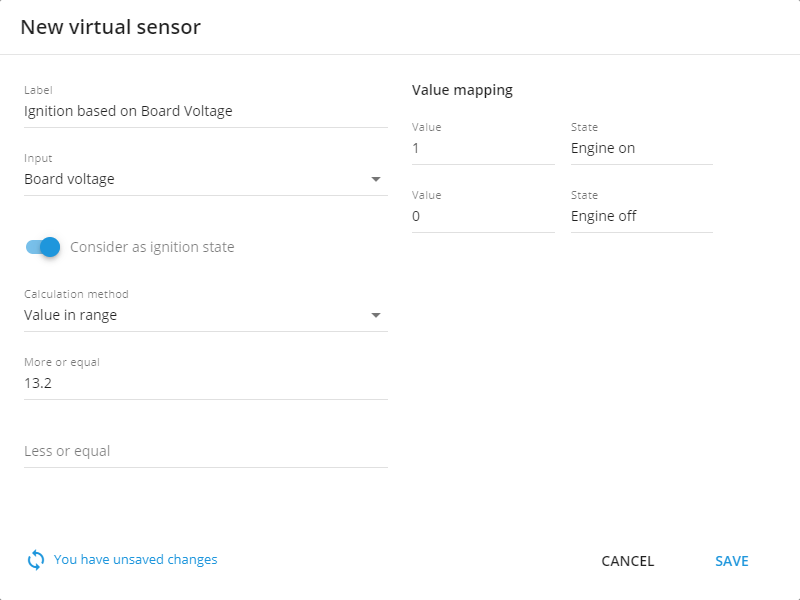
Exemplo de configuração para ignição virtual
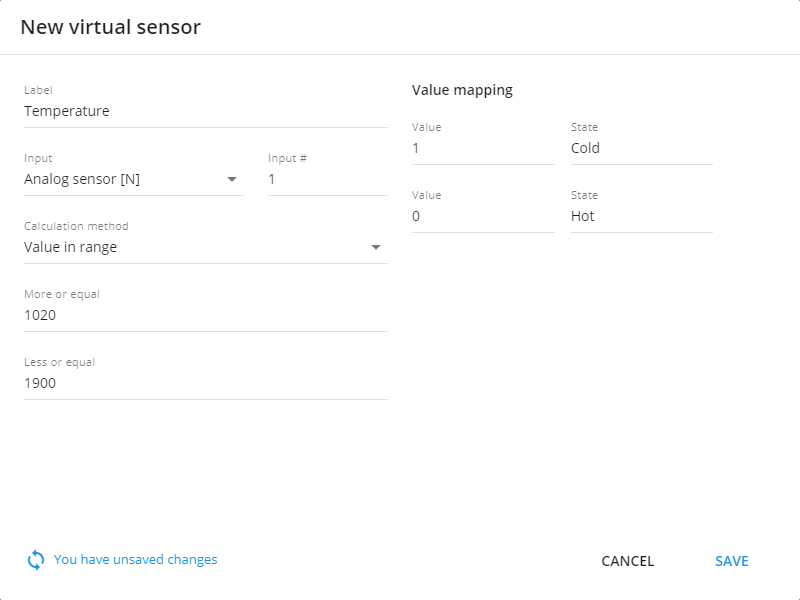
Exemplo de configuração para leitura de temperatura de sensor analógico
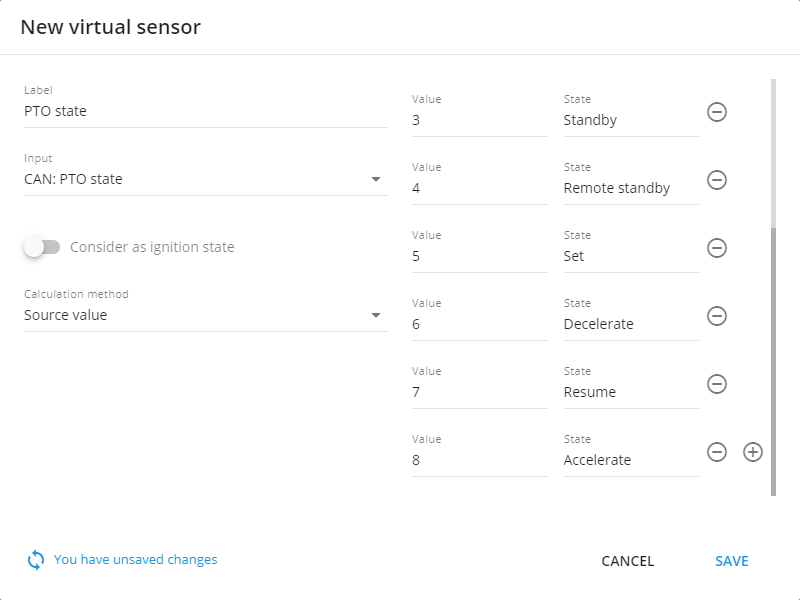
Exemplo de configuração para o método de cálculo de valor de origem
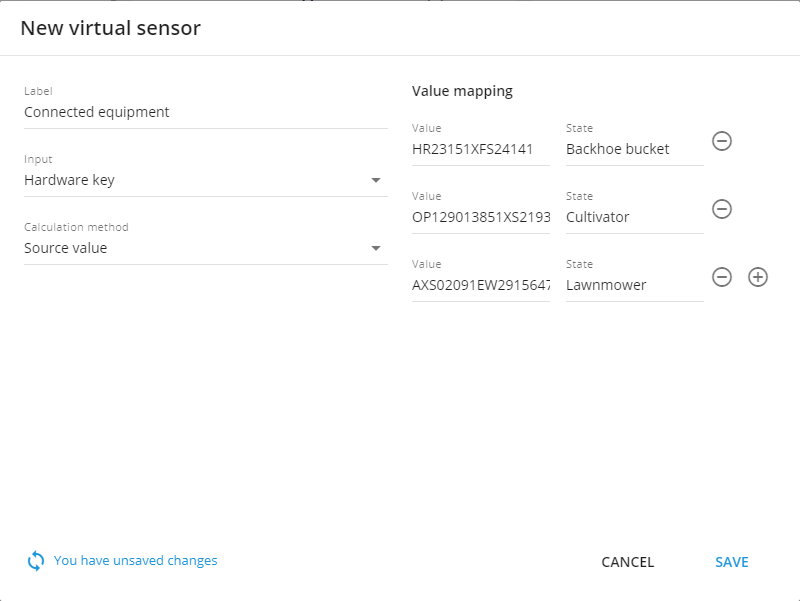
Exemplo de configuração para o método de cálculo de valor de origem para leitura de sensor de chave de hardware ou campo de estado
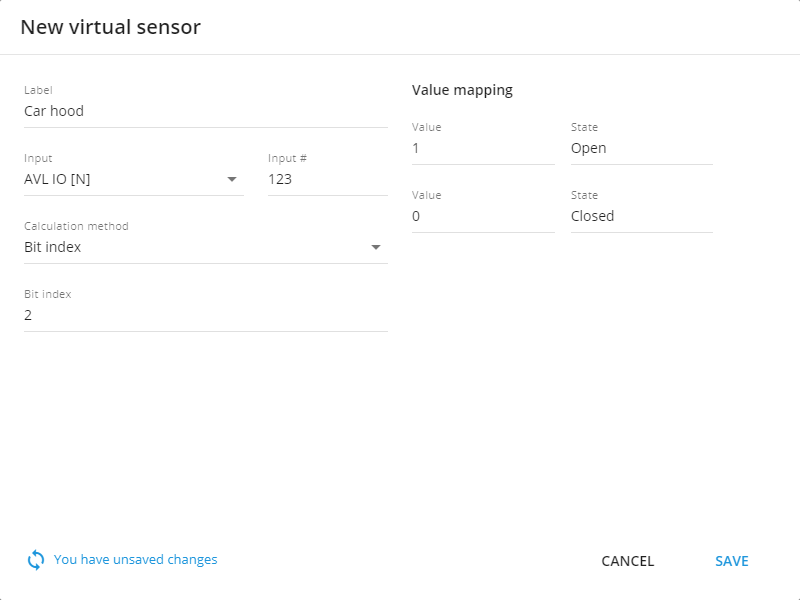
Exemplo de configuração para sensor de cálculo de Índice de bit