Cuatro maneras de mejorar las operaciones con la automatización de flotas basadas en la ubicación

Sus geocercas funcionan. Detectan cruces de límites, registran entradas y salidas, y envían notificaciones. Luego alguien tiene que leer esa notificación, decidir si importa y determinar qué hacer al respecto. La brecha entre la detección y la respuesta es donde las operaciones pierden dinero.
Este artículo le muestra cuatro plantillas listas para usar que cierran esa brecha automáticamente.
La realidad operativa de las industrias dependientes de la ubicación
La construcción, la logística, el sector de petróleo y gas, las flotas municipales y la agricultura comparten una característica fundamental: la ubicación define qué se considera normal. Una excavadora en un sitio de trabajo a las 10:00 AM está operando. La misma excavadora saliendo del sitio a las 2:00 AM es un problema.
Las cifras lo hacen más tangible. En EE. UU. se reportan más de 11.000 robos de equipos de construcción cada año, y se estima que la cifra real es de dos a tres veces mayor. La tasa de recuperación es inferior al 21%, lo que significa que la mayoría de los equipos robados se pierden para siempre. En el Reino Unido, el robo en obras de construcción le cuesta a la industria más de £1 mil millones cada año.
Pero el robo es solo una de las categorías de riesgos dependientes de la ubicación. Considere el uso no autorizado fuera del horario laboral, donde el equipo acumula horas de motor, consumo de combustible y desgaste sin generar ingresos. Considere las violaciones de velocidad en zonas donde los peatones trabajan junto a maquinaria pesada. Considere los vehículos que entran en áreas restringidas cerca de operaciones de perforación activas o carreteras propensas a inundaciones.
Estos no son problemas de monitoreo. Los administradores de flotas han utilizado geocercas durante años. El desafío es que las alertas requieren interpretación humana, priorización manual y respuesta reactiva. Una notificación a las 3:00 AM sobre un equipo que sale de un sitio no evita que el equipo se retire.
Cómo las geocercas de flota crean un contexto operativo
La geocerca define los límites operativos de la conducta normal. Una zona de entrega, el perímetro de un sitio de trabajo, un área restringida, una ubicación de estacionamiento designada. Cada límite representa una decisión sobre qué debería ocurrir y dónde.
Las alertas de geocercas estándar le indican cuando se cruzan esos límites. Entrada, salida, tiempo en la zona. Esta información es valiosa. Crea un registro operativo y permite el análisis.
La limitación es estructural. Una alerta es información, no acción. Requiere que alguien la reciba, la evalúe y decida qué hacer. Durante el horario laboral, eso podría funcionar. Durante las horas libres, fines de semana o períodos de alto volumen donde docenas de alertas compiten por la atención, la brecha entre la detección y la respuesta se agranda.
La geocerca lo lleva hasta la mitad del camino. La pregunta es qué sucede después de que se cruza el límite.
La automatización de geocercas con IoT Logic
IoT Logic es la herramienta de automatización sin código de Navixy que le permite crear reglas que conectan eventos telemáticos con comandos de dispositivo, notificaciones y sistemas externos. La incorporación reciente de geozonas como parámetros significa que el contexto de ubicación ahora fluye directamente hacia la lógica de automatización.
El mecanismo funciona así: un evento de ubicación (entrada, salida, posición dentro de una zona) activa una verificación de condición. Si las condiciones coinciden, el sistema ejecuta acciones automáticamente. Esas acciones pueden incluir la activación de salidas del dispositivo (zumbadores, inmovilizadores), el envío de notificaciones webhook a sistemas externos y el registro de eventos en el historial de seguimiento.
Esto cambia el modelo operativo. En lugar de "detectar, alertar y esperar la respuesta humana", la secuencia se convierte en "detectar, evaluar las condiciones y ejecutar la respuesta". Las cuatro plantillas a continuación implementan este patrón para los desafíos más comunes dependientes de la ubicación.
Plantilla 1: Límite de velocidad en zona
La plantilla del límite de velocidad en zona aborda un problema específico: hacer cumplir diferentes reglas de velocidad dentro de áreas definidas. Un límite de 60 km/h en carreteras públicas puede ser seguro, pero esa misma velocidad en una zona de carga con peatones o en un área residencial de entregas crea responsabilidad.
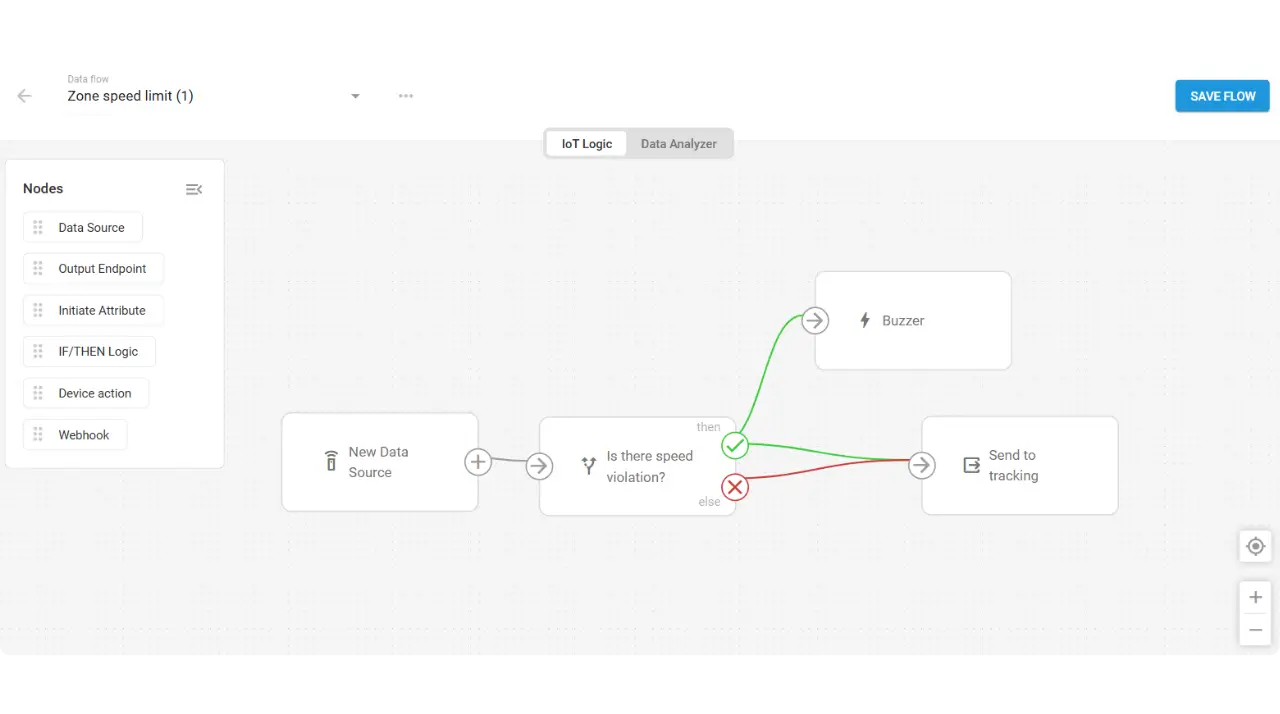
La plantilla utiliza una verificación continua de condiciones. Supervisa si el vehículo se encuentra dentro de la geocerca designada Y si la velocidad excede el umbral. Ambas condiciones deben ser verdaderas. Cuando lo son, suceden dos cosas simultáneamente: el dispositivo activa la salida 1 (generalmente un zumbador), brindando retroalimentación inmediata al conductor, y el evento se registra en el historial de seguimiento.
En la minería y la industria pesada, esto hace cumplir los límites de velocidad en zonas de carga y áreas de personal donde la visibilidad es limitada y las distancias de frenado son importantes. En logística y entregas de última milla, proporciona documentación de cumplimiento para áreas de entrega residencial donde los clientes y peatones comparten el espacio.
La plantilla es configurable. El umbral de velocidad, la geocerca objetivo y la acción de salida se pueden ajustar a requisitos operativos específicos.
Plantilla 2: Estacionamiento fuera del sitio fuera del horario laboral
Esta plantilla combina la ubicación y la consciencia del tiempo para abordar dos problemas relacionados: la prevención de robos y el uso personal no autorizado de activos de la empresa.
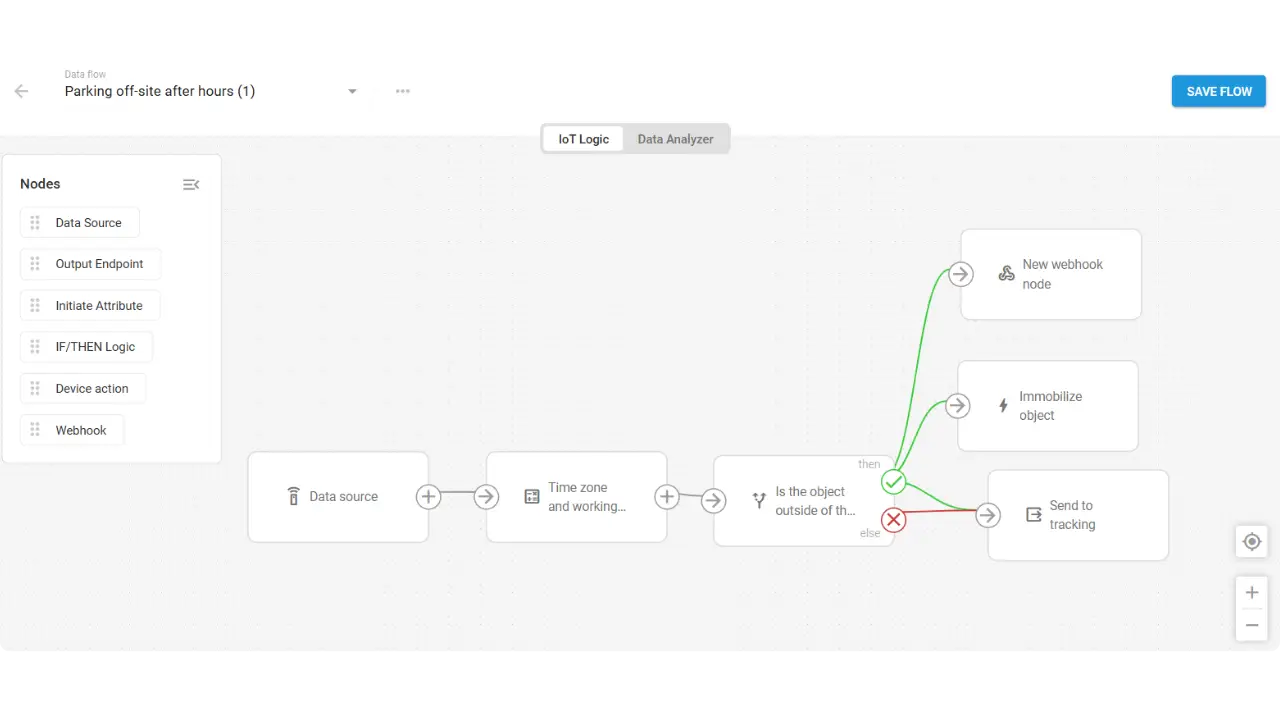
La lógica incorpora la zona horaria y el horario laboral. La configuración predeterminada utiliza el horario laboral de 9:00 a 21:00 en UTC+2, pero estos parámetros son ajustables. Luego, la plantilla verifica una condición compuesta: ¿Está el vehículo fuera de la geocerca de estacionamiento designada Y es la hora actual fuera del horario laboral O es fin de semana?
Cuando ambas condiciones coinciden, la respuesta es doble. Primero, se envía una notificación webhook al endpoint configurado. La plantilla incluye la integración con Telegram como ejemplo, pero funciona con cualquier sistema compatible con webhook. Segundo, se activa la salida 2, generalmente conectada a un inmovilizador.
Para operaciones de construcción, esto significa que la maquinaria no puede salir del sitio durante la noche o los fines de semana sin activar tanto una alerta como una respuesta de protección. Para operaciones de alquiler de automóviles o flotas corporativas, hace cumplir ubicaciones de estacionamiento autorizadas fuera del horario laboral.
Esta es la plantilla más compleja lógicamente, pero la interfaz sin código maneja los cálculos de tiempo y las combinaciones de condiciones sin requerir secuencias de comandos.
Plantilla 3: Detección de áreas peligrosas
Algunas zonas requieren notificación inmediata en el momento de entrada, no monitoreo continuo posterior. Áreas restringidas en operaciones de petróleo y gas, carreteras propensas a inundaciones, zonas de construcción activas donde las condiciones cambian rápidamente.
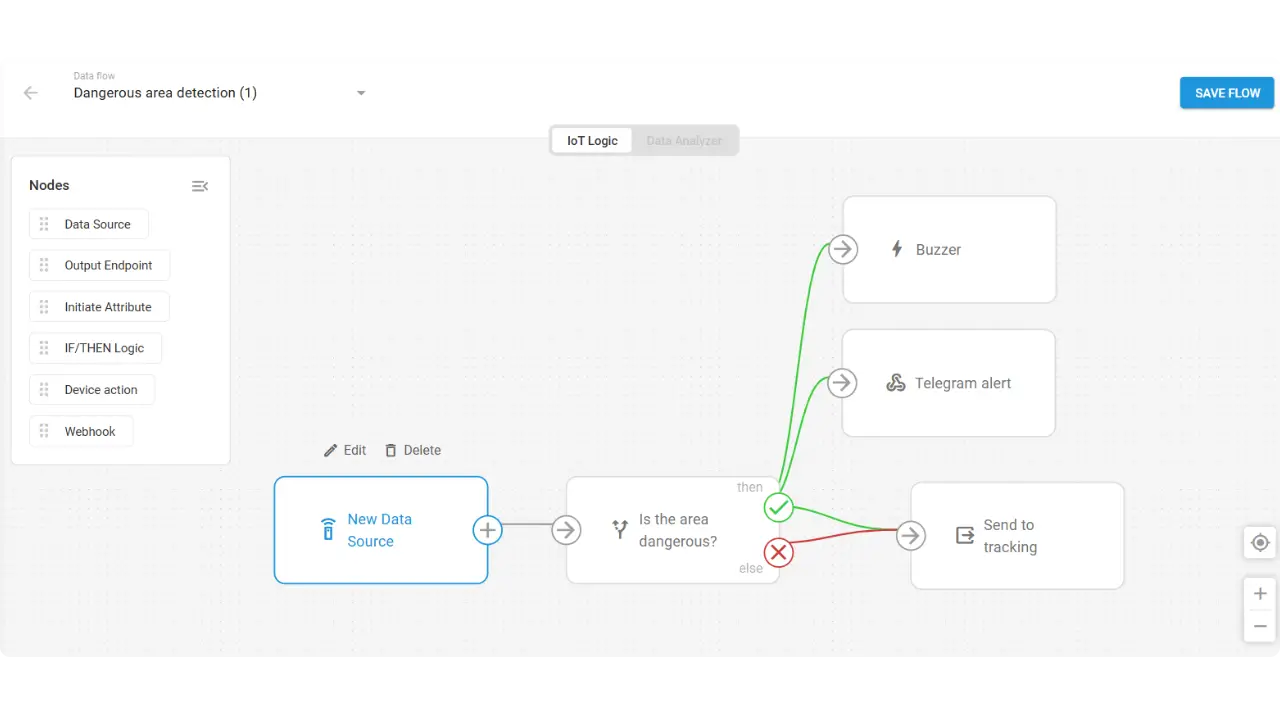
Cuando se produce la entrada, la plantilla ejecuta tres acciones en paralelo: se activa la salida 1 (zumbador) para alertar al conductor de inmediato, se envía una notificación webhook a supervisores u oficiales de seguridad, y el evento se registra en el seguimiento. La ejecución en paralelo significa que no hay demoras de secuenciación. Tanto el conductor como el supervisor se enteran del cruce de límites al mismo tiempo.
En operaciones de petróleo y gas, esto brinda alertas instantáneas cuando los vehículos se acercan a zonas restringidas cerca de equipos de perforación o procesamiento activos. En aplicaciones municipales y de ciudad inteligente, puede enviar alertas cuando los vehículos ingresan a carreteras cerradas debido a inundaciones, accidentes o condiciones de emergencia.
El enfoque de evento de entrada evita el ruido de alertas. El sistema se activa una vez al cruzar, no continuamente mientras el vehículo opera legítimamente dentro de una zona permitida.
Plantilla 4: Protección antirrobo
Con tasas de recuperación de equipos por debajo del 21%, la prevención importa más que el seguimiento posterior. La plantilla antirrobo adopta un enfoque directo: cuando un activo sale de una zona permitida, se detiene.
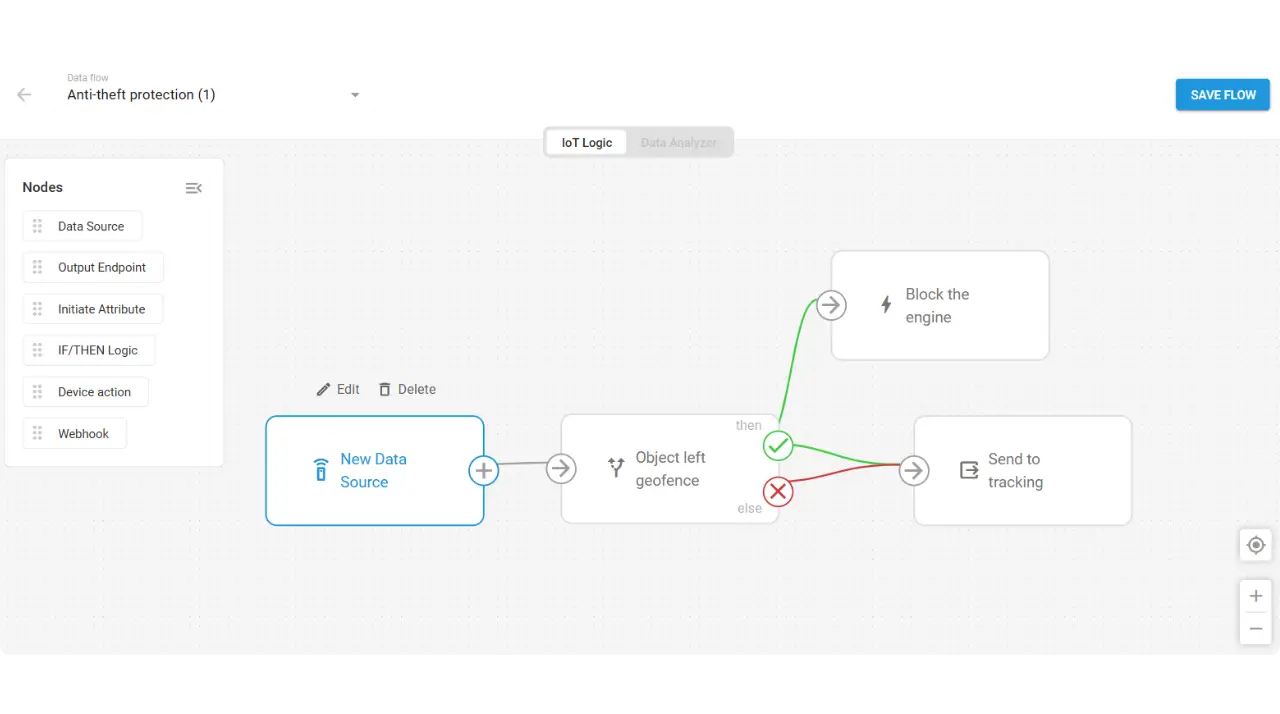
Aquí hay una nota de implementación crítica. Para vehículos que podrían estar en movimiento en el momento de la salida, la plantilla debe combinarse con dispositivos que admitan corte gradual del motor. Teltonika FMB Series con SECO (Safe Engine Cut Off) es un ejemplo. Esto evita paradas repentinas que podrían causar accidentes y, al mismo tiempo, garantiza que el vehículo no pueda continuar mucho más allá del límite.
Para concesionarios de automóviles, esto detiene la extracción no autorizada de vehículos antes de que puedan alejarse demasiado del lote. Para operaciones agrícolas donde se utilizan equipos de alto valor en campos remotos con seguridad física limitada, ofrece una respuesta protectora automatizada que no depende de que alguien controle alertas.
Tanto el evento de salida como el flujo normal de datos se registran en el seguimiento, asegurando un historial completo independientemente de si se activó la condición de robo.
Automatización de flotas basada en la ubicación más allá de las alertas básicas
Entonces, esto es lo que tenemos. La geocerca establece cómo luce la normalidad. La automatización ofrece la respuesta cuando se cruzan los límites. Las plantillas eliminan la interpretación humana y los pasos de acción manual que generan retrasos en la respuesta.
Para los operadores de flotas, esto significa protección que no depende de que alguien esté mirando las alertas. Las plantillas abordan los problemas más comunes dependientes de la ubicación, desde el cumplimiento de velocidades hasta la prevención de robos, sin requerir desarrollo personalizado ni recursos técnicos.
Para los Proveedores de Servicios Telemáticos (TSP) que desarrollan ofertas de servicio, la automatización basada en la ubicación representa un diferenciador que puede empaquetarse para sectores específicos. Las empresas de construcción, las compañías de alquiler, las operadoras de petróleo y gas, y las flotas municipales tienen requisitos dependientes de la ubicación. La automatización telemática de bajo código le permite crear soluciones adaptadas a sus operaciones sin comenzar desde cero cada vez.
Las plantillas son un punto de partida. Personalice los umbrales, las zonas, las acciones y los endpoints de notificación para satisfacer necesidades operativas específicas. Explore las plantillas de IoT Logic y comience a crear automatizaciones basadas en la ubicación para su flota.
Reserve una demostración para ver cómo estas plantillas de automatización de geocercas pueden funcionar para sus operaciones, o cuéntenos qué tipo de flujo de trabajo desea automatizar y lo ayudaremos a diseñarlo.