Gestión de flotas de e-scooters. Escalando sin romper las operaciones

AutorRoman S, Product owner, Navixy integrations
Gestión de flotas de e-scooters. Escalando sin romper las operaciones
Un operador de movilidad compartida comenzó a enfrentar problemas de escalamiento a medida que su flota de e-scooters se expandía a varias ciudades. Los flujos de pago, el monitoreo de cumplimiento, las alertas de seguridad y las automatizaciones de mantenimiento gradualmente se volvieron más difíciles de gestionar dentro de un único flujo operativo. Cada nueva automatización resolvía un problema, pero hacía que el sistema general fuera más difícil de mantener, depurar y escalar.
Este estudio de caso explora cómo el operador reorganizó sus automatizaciones, separó los dominios operativos y cambió su enfoque a la gestión de flotas de e-scooters a medida que el negocio seguía creciendo.
Por qué escalar la gestión de flotas de e-scooters se vuelve difícil operativamente
En las flotas compartidas de e-scooters, incluso los retrasos operativos más pequeños se vuelven visibles de inmediato. Los usuarios esperan que los scooters se desbloqueen casi al instante después de la confirmación de pago. Cuando eso no sucede, las personas abandonan el viaje, se acumulan los tickets de soporte y los operadores comienzan a perder ingresos antes de que el viaje siquiera empiece.
Pero los problemas de pago para iniciar el viaje son solo una parte de la presión con la que los operadores de movilidad compartida lidian a diario. El robo, la manipulación, el movimiento no autorizado, el cumplimiento de límites de velocidad, la gestión de baterías y las normativas específicas de cada ciudad añaden su propia capa de caos operativo. Cada nueva ciudad conlleva diferentes requisitos de informes. Cada nuevo flujo de trabajo introduce más alertas, más dependencias y más formas en que sistemas no relacionados pueden interferir repentinamente entre sí.
Administrar una flota de 200 e-scooters, aunque no es una tarea operativa sencilla, todavía parece bastante manejable.
Escalar a 2,000 scooters distribuidos en múltiples ciudades, equipos y reglas operativas empieza a sentirse como intentar coordinar varios sistemas superpuestos mientras los incidentes, alertas y actualizaciones de flujos de trabajo siguen encendiéndose a tu alrededor.
 “Esto está bien” © KC Green
“Esto está bien” © KC Green
Esa era exactamente la situación que enfrentó un operador de movilidad compartida cuando su flota se expandió. Los flujos de pago, la supervisión de cumplimiento, las alertas de seguridad y las automatizaciones de mantenimiento gradualmente se volvieron difíciles de gestionar dentro de un único flujo operativo.
Pero analicémoslo detalladamente.
Estudio de caso: automatizando operaciones de e-scooters compartidos
Un operador europeo de movilidad compartida abordó primero el problema desde la perspectiva de la experiencia del usuario.
La empresa se enfrentaba a una creciente frustración en torno a los retrasos de activación del viaje. Los usuarios completaban el pago en la aplicación, se quedaban al lado del scooter esperando que se desbloqueara y, a veces, abandonaban el viaje por completo si el proceso tomaba demasiado tiempo.
En flotas más pequeñas, estos incidentes se podían manejar de forma manual. Pero a medida que la flota se expandía a varias ciudades, los tickets de soporte relacionados con demoras en el desbloqueo empezaron a aumentar en paralelo con las quejas de los usuarios y la sobrecarga operativa.
El operador decidió automatizar el proceso de pago-para-iniciar el viaje usando IoT Logic.
Nota: IoT Logic es un entorno de código bajo para telemática y automatización IoT. Los flujos de trabajo que antes requerían desarrollo backend e integraciones personalizadas pueden configurarse de manera visual en menos de una hora, dependiendo de la complejidad.
El flujo inicial escuchaba una señal de confirmación de pago dentro de la corriente de telemetría entrante. Una vez que la plataforma detectaba que el atributo de pago personalizado había cambiado a un estado confirmado, el flujo activaba un comando remoto M2M GPRS que liberaba el bloqueo del scooter. Al mismo tiempo, la telemetría continuaba enviándose a Navixy con fines de supervisión y seguimiento.
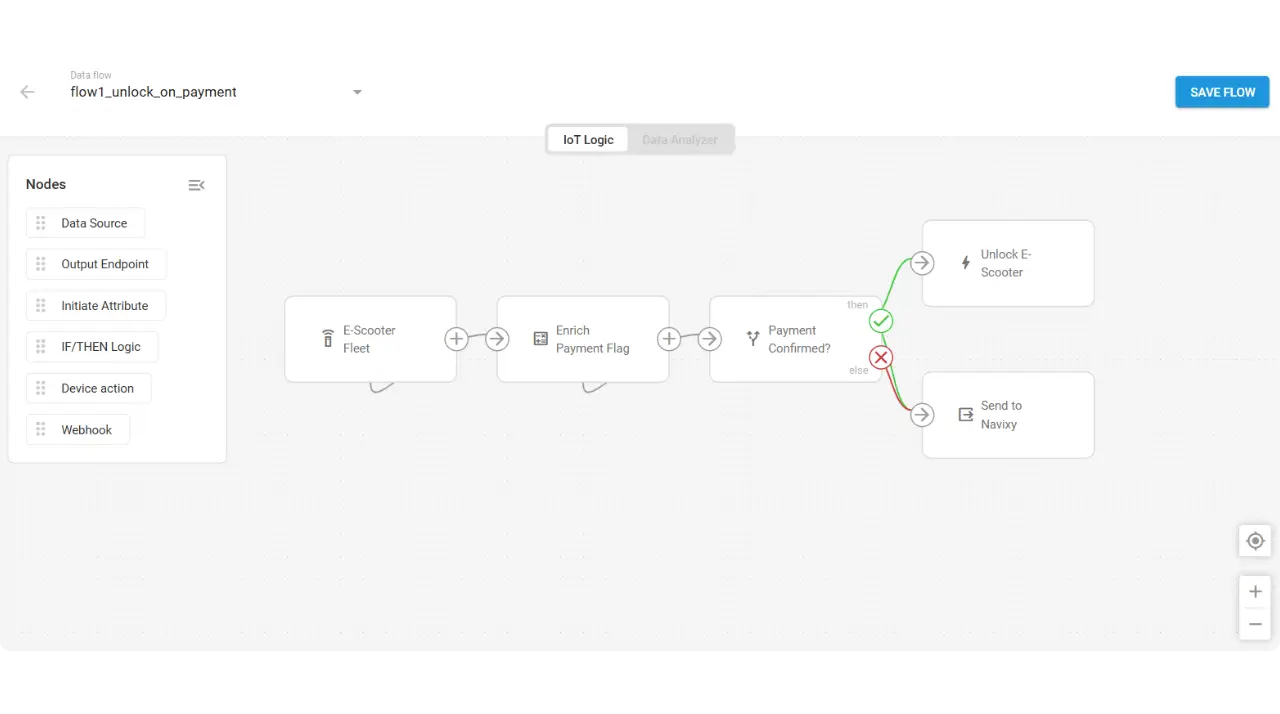
La automatización en sí era relativamente sencilla. Confirmación de pago adentro, comando de desbloqueo afuera.
La latencia al iniciar el viaje bajó. La confiabilidad del desbloqueo mejoró. Las quejas de los usuarios disminuyeron.
Más importante aún, el operador descubrió con qué rapidez las automatizaciones operativas pueden mejorar la capacidad de respuesta de la flota sin requerir integraciones profundamente acopladas ni desarrollo backend adicional.
Expansión hacia flujos de trabajo de cumplimiento y seguridad
Después de automatizar el proceso de pago para iniciar el viaje, el operador comenzó a analizar otros cuellos de botella operativos y procesos repetitivos que podían manejarse automáticamente a medida que la flota seguía creciendo.
El cumplimiento de velocidad estaba impulsado por requisitos municipales. Varias ciudades de Europa y Estados Unidos han adoptado límites de 25 km/h para e-scooters compartidos, y muchas exigen a los operadores que reporten violaciones sostenidas. El operador necesitaba una forma de detectar cuándo un usuario superaba el límite en mensajes de telemetría consecutivos, filtrando picos de GPS, y crear un registro de incidente con coordenadas, marca de tiempo y ID del dispositivo.
Un nodo webhook podía enviar ese incidente a su CRM, creando un registro de cumplimiento sin intervención manual.
La detección de movimiento no autorizado abordaba otra presión operativa: scooters que se movían cuando no existía una sesión de alquiler activa. Este patrón a menudo indicaba robo o manipulación. El operador quería activar una alerta para operaciones, adjuntar coordenadas GPS y activar de forma remota la alarma a bordo del scooter.
La detección de manipulación iba más allá. La apertura de la carcasa, el desacoplamiento del rastreador y los patrones anormales de vibración indicaban que alguien intentaba deshabilitar o robar el scooter. Estos eventos necesitaban activar la alarma de inmediato, reenviar los datos de posición a Navixy y crear un incidente de seguridad para el equipo de respuesta.
Cada automatización atendía una necesidad operativa real. Cada automatización se agregó inicialmente al flujo existente.
Por qué la configuración original dejó de funcionar
Como suele ocurrir, este tipo de escalamiento no llegó sin complicaciones.
En esta ocasión, la razón fue una limitación arquitectónica en IoT Logic. Un dispositivo utilizado como fuente de datos solo podía pertenecer a un flujo a la vez. Usarlo en una nueva automatización lo eliminaba automáticamente del flujo anterior.
La solución temporal parecía razonable al principio. El operador combinó la lógica de pago, el cumplimiento de velocidad, las alertas de seguridad y la detección de manipulación en un gran flujo que manejaba todo a la vez.
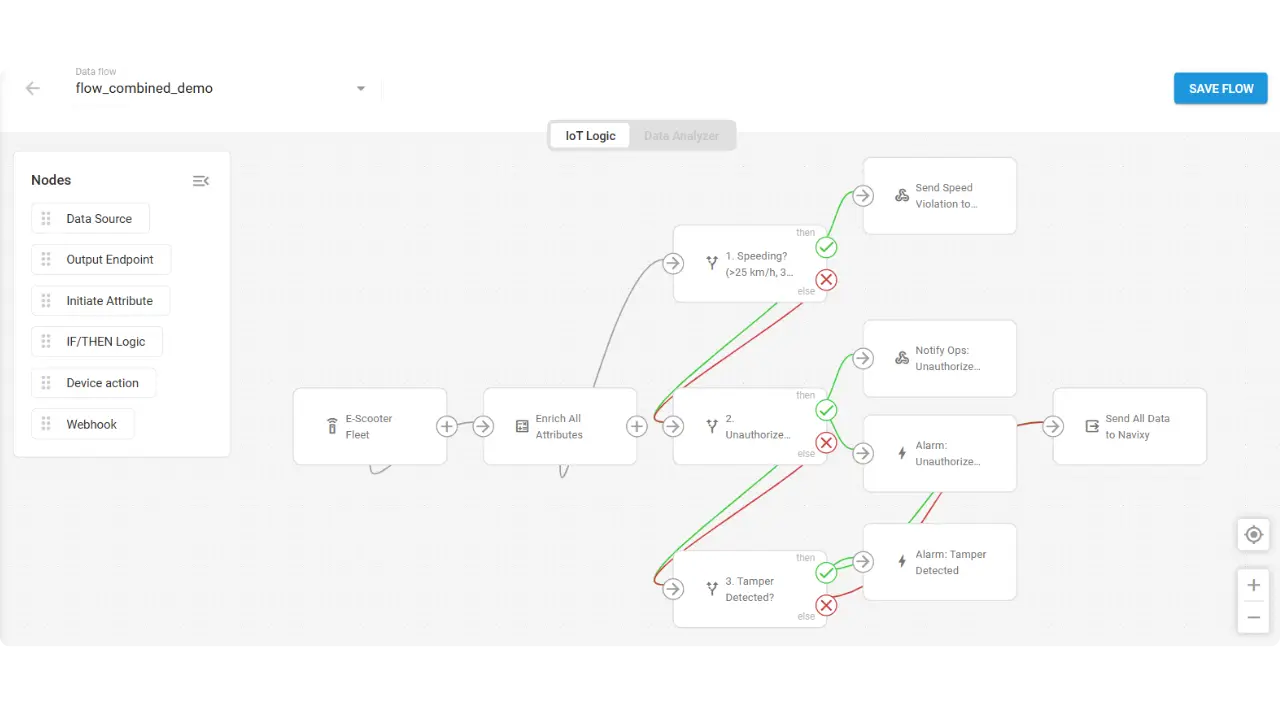
Técnicamente, funcionó. Sin embargo, se volvió muy difícil de mantener con rapidez.
Cada nueva automatización volvía el flujo más frágil. La resolución de problemas empezaba a tardar más porque la lógica de pago, cumplimiento, seguridad y mantenimiento estaban todas interconectadas. Actualizar una parte del flujo significaba poner en riesgo procesos no relacionados en toda la flota.
El sistema que buscaba simplificar las operaciones parecía convertirse gradualmente en otro cuello de botella operativo.
Transición hacia automatizaciones operativas modulares
El punto de inflexión llegó cuando la plataforma permitió que el mismo dispositivo participara en múltiples flujos IoT Logic de forma simultánea. Lo que antes requería un único flujo operativo sobredimensionado ahora podía separarse en dominios operativos dedicados sin duplicar transmisiones de telemetría ni acoplar automatizaciones no relacionadas.
El operador reconstruyó sus automatizaciones como cuatro flujos independientes:
- Flujo de pago: la confirmación de pago desencadena el comando de desbloqueo
- Flujo de cumplimiento: el exceso de velocidad sostenido genera un incidente en el CRM
- Flujo de seguridad: el movimiento no autorizado genera una alerta y activa la alarma
- Flujo de manipulación: la apertura de la carcasa o el desacoplamiento activa la alarma y reenvía la posición
Cada flujo recibía la misma telemetría del dispositivo. Cada flujo operaba de forma independiente. Modificar la lógica de cumplimiento no afectaba la lógica de pago. Probar el flujo de seguridad no requería probar el flujo de manipulación.
Analicémoslos rápidamente.
Flujo 1: Desbloqueo del scooter tras el pago
Disparador: Aparece un evento de confirmación de pago en la corriente de telemetría, lo que indica que el usuario ha completado la transacción.
Acción: IoT Logic envía un comando remoto de desbloqueo a través de GPRS. El control de salida del scooter se activa, liberando el candado físico. La sesión de viaje inicia.
Propósito: Reducir la fricción al iniciar el viaje. Los usuarios esperan respuesta inmediata tras el pago. Las demoras generan frustración y abandono.
Flujo 2: Reporte de violación de límite de velocidad
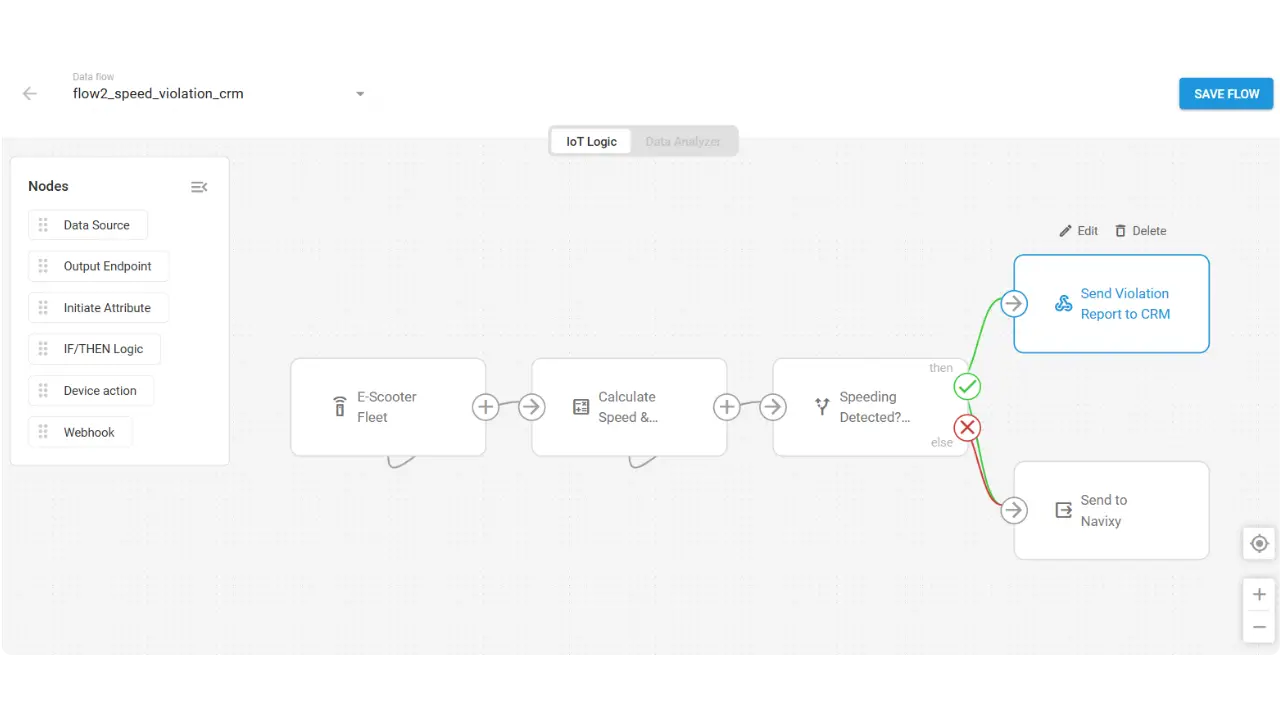
Disparador: La velocidad supera los 25 km/h en mensajes de telemetría consecutivos. El requisito de mensajes consecutivos filtra picos de GPS y aceleraciones breves, registrando solo violaciones sostenidas.
Acción: Un webhook crea un incidente en el CRM que incluye coordenadas, marca de tiempo, lectura de velocidad e ID del dispositivo. El equipo de cumplimiento recibe un registro listo para informar a las autoridades municipales.
Propósito: Cumplimiento municipal y responsabilidad del usuario. Muchas ciudades exigen a los operadores documentar y abordar las violaciones de velocidad como condición para sus permisos de operación.
Flujo 3: Detección de movimiento no autorizado
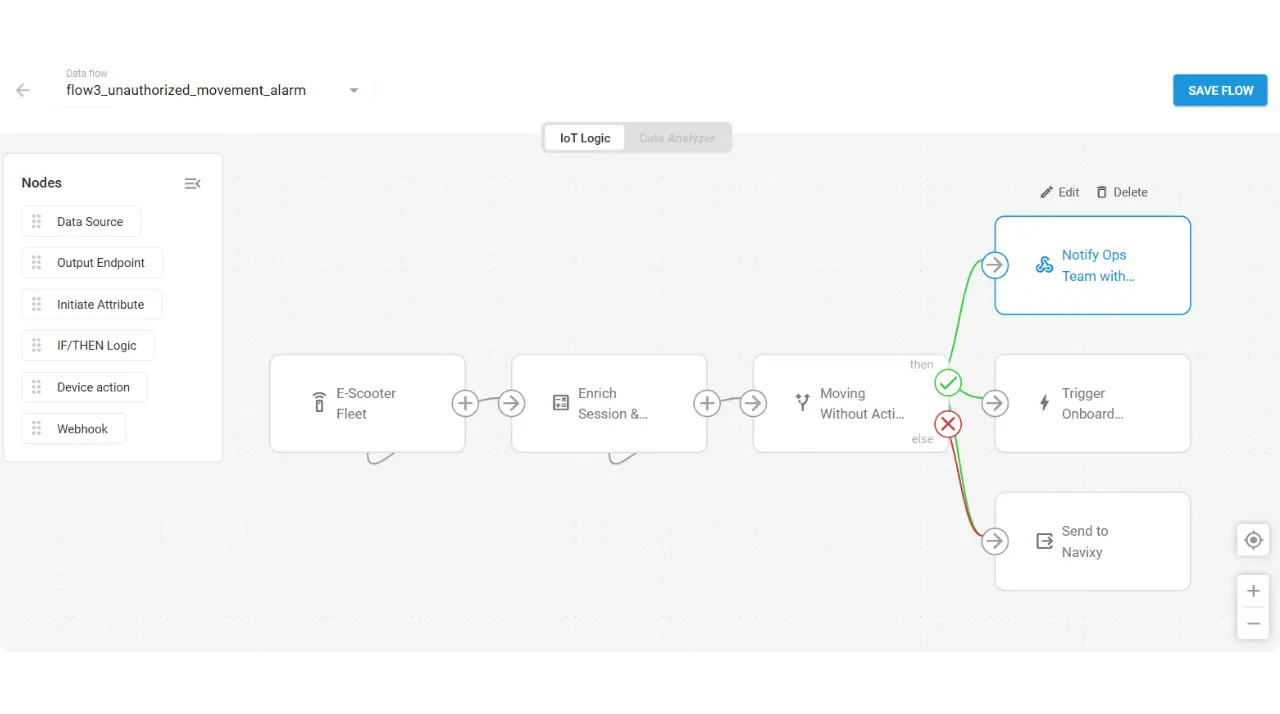
Disparador: El scooter reporta movimiento cuando no existe una sesión de alquiler activa. Este patrón sugiere que el scooter está siendo movido sin autorización.
Acción: Un webhook alerta al equipo de operaciones con coordenadas GPS. Al mismo tiempo, el flujo envía un comando remoto para activar la alarma a bordo del scooter. La telemetría continúa enviándose a Navixy para seguimiento.
Propósito: Reducir el tiempo de respuesta ante robos y mejorar la recuperación de activos. La alarma atrae la atención. Las coordenadas permiten la intervención. La telemetría proporciona un rastro.
Flujo 4: Detección de manipulación
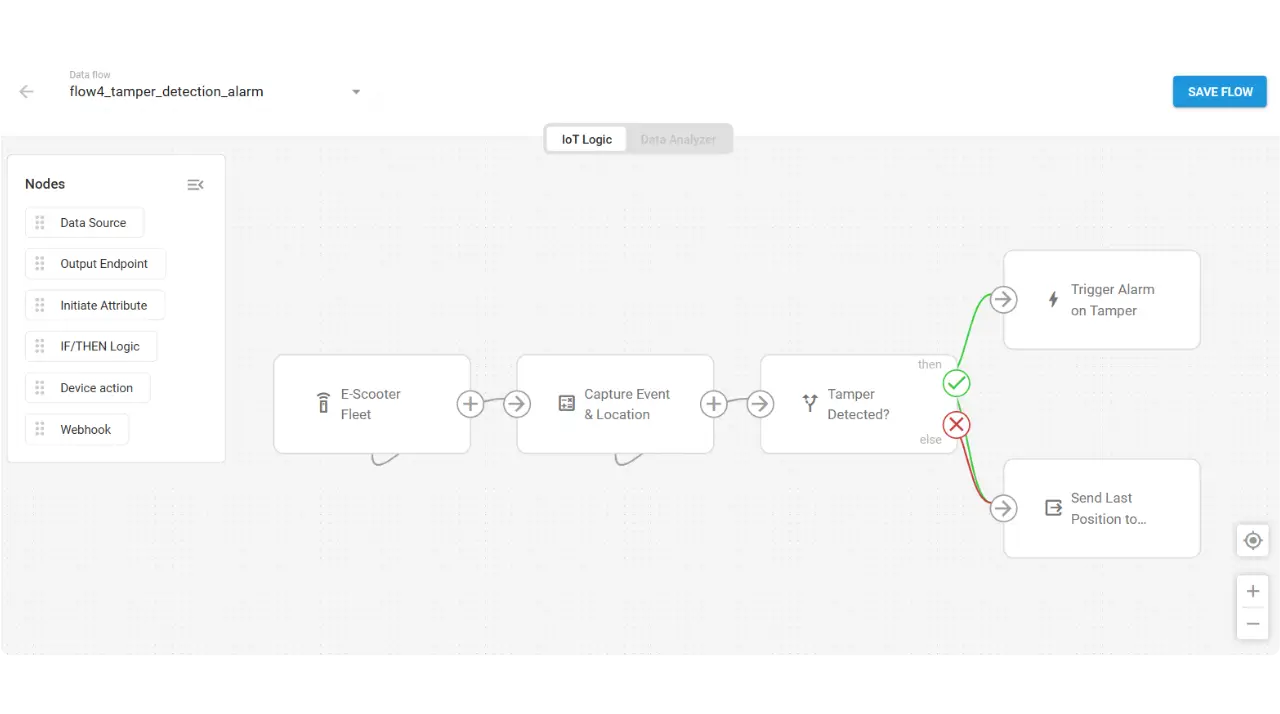
Disparador: El scooter reporta la apertura de la carcasa, el desacoplamiento del rastreador o un patrón anormal de vibración. Estas señales indican manipulación física.
Acción: La alarma a bordo se activa de inmediato mediante un comando remoto. Se reenvían los datos de posición a Navixy. Se genera un evento de incidente de seguridad para el centro de operaciones de seguridad.
Propósito: Reducir el tiempo de inactividad relacionado con la manipulación y fortalecer la protección antirrobo. La activación inmediata de la alarma disuade la manipulación adicional. El reenvío de posición facilita la recuperación.
Resultados estratégicos para operadores de movilidad compartida
Separar las automatizaciones en flujos independientes dio al operador mucha más flexibilidad a medida que la flota seguía creciendo. En lugar de reconfigurar constantemente un sistema sobredimensionado, los equipos podían escalar y adaptar los flujos de trabajo de forma independiente.
Los resultados operativos clave incluyeron:
Expansión más rápida a nuevas ciudades Compliance workflows podían ajustarse a la normativa local sin rediseñar las automatizaciones de pago, seguridad o mantenimiento.
Menor riesgo operativo Los problemas en un flujo ya no afectaban sistemas no relacionados en toda la flota.
Propiedad más sencilla de los flujos de trabajo Los equipos de cumplimiento, seguridad y operaciones podían gestionar y actualizar sus propias automatizaciones de forma independiente.
Mayor facilidad para experimentar con nuevas automatizaciones Nuevos flujos podían probarse e implementarse gradualmente sin volver todo el sistema más difícil de mantener.
Escalar las operaciones de la flota sin escalar el caos operativo
Para los operadores de movilidad compartida, escalar una flota eventualmente deja de ser solo un problema de hardware o logística. Se convierte en un problema de gestión de flujos de trabajo. Cuantas más ciudades, requisitos de cumplimiento, automatizaciones y equipos operativos se agreguen, más difícil será evitar que sistemas no relacionados interfieran entre sí.
En este caso, separar las automatizaciones en flujos independientes de IoT Logic ofreció al operador una forma de seguir escalando sin convertir la capa de automatización en otro cuello de botella operativo. Y a medida que las operaciones de movilidad compartida se vuelven cada vez más complejas, ese tipo de flexibilidad se vuelve tan importante como la propia flota.
Si ha estado limitando sus automatizaciones porque los dispositivos solo podían pertenecer a un flujo a la vez, este podría ser el momento adecuado para revisar cómo están estructurados sus flujos de trabajo. Reserve una demostración para hablar sobre sus automatizaciones y explorar cómo podrían gestionarse con IoT Logic.
En esta página