Quatre façons d'améliorer les opérations grâce à l’automatisation de flotte basée sur la localisation

Vos géofences fonctionnent. Elles détectent les franchissements de limites, consignent les entrées et les sorties, et envoient des notifications. Ensuite, quelqu’un doit lire cette notification, décider de son importance et déterminer quoi faire. C’est dans l’intervalle entre la détection et la réponse que les opérations subissent des pertes.
Cet article vous présente quatre modèles prêts à l’emploi qui comblent automatiquement cet écart.
La réalité opérationnelle des secteurs dépendant de la localisation
La construction, la logistique, l’industrie pétrolière et gazière, les flottes municipales et l’agriculture ont tous une caractéristique fondamentale : la localisation définit ce qui est considéré comme normal. Une pelle excavatrice sur un chantier à 10 h est en service. La même pelle quittant le chantier à 2 h du matin est un problème.
Les chiffres rendent cela concret. Aux États-Unis, plus de 11 000 vols d’équipements de construction sont signalés chaque année, et le chiffre réel est estimé à deux ou trois fois plus élevé. Le taux de récupération est inférieur à 21 %, ce qui signifie que la plupart des équipements volés sont perdus à jamais. Au Royaume-Uni, les vols sur les chantiers de construction coûtent à l’industrie plus d’un milliard de livres sterling chaque année.
Mais le vol n’est qu’une catégorie de risque liée à la localisation. Pensez à l’utilisation non autorisée en dehors des heures, où l’équipement accumule des heures moteur, consomme du carburant et s’use sans générer de revenus. Pensez aux excès de vitesse dans des zones où les piétons côtoient des engins lourds. Pensez aux véhicules entrant dans des zones restreintes près de forages actifs ou sur des routes sujettes aux inondations.
Il ne s’agit pas de problèmes de surveillance. Les gestionnaires de flotte utilisent des géofences depuis des années. Le défi réside dans le fait que les alertes nécessitent une interprétation humaine, une priorisation manuelle et une réponse réactive. Une notification à 3 h du matin au sujet d’un équipement quittant un site n’empêche pas l’équipement de partir.
Comment le géorepérage de flotte crée un contexte opérationnel
Le géorepérage définit les limites opérationnelles du comportement normal. Une zone de livraison, le périmètre d’un chantier, une zone interdite, un emplacement de stationnement désigné. Chaque limite représente une décision quant à ce qui doit se produire où.
Les alertes de géofence standard vous indiquent quand ces limites sont franchies. Entrée, sortie, temps de stationnement. Ces informations sont précieuses. Elles créent un historique opérationnel et permettent l’analyse.
La limitation est structurelle. Une alerte est une information, pas une action. Elle nécessite que quelqu'un la reçoive, l’évalue et décide de la marche à suivre. Pendant les heures de bureau, cela peut fonctionner. En dehors des heures, les week-ends ou pendant les périodes de forte activité où des dizaines d’alertes se disputent l’attention, l’intervalle entre la détection et la réponse s’allonge.
Le géorepérage vous mène à mi-chemin. La question est de savoir ce qui se passe après le franchissement de la limite.
Automatisation du géorepérage avec IoT Logic
IoT Logic est l’outil d’automatisation sans code de Navixy qui vous permet de créer des règles reliant les événements de télématique aux commandes de l’appareil, aux notifications et aux systèmes externes. L’ajout récent de géozones en tant que paramètres signifie que le contexte de localisation alimente désormais directement la logique d’automatisation.
Le mécanisme fonctionne ainsi : un événement de localisation (entrée, sortie, position à l’intérieur d’une zone) déclenche une vérification des conditions. Si les conditions correspondent, le système exécute automatiquement des actions. Ces actions peuvent inclure l’activation de sorties de l’appareil (sonneurs, immobilisateurs), l’envoi de notifications webhook à des systèmes externes et l’enregistrement d’événements dans l’historique de suivi.
Cela modifie le modèle opérationnel. Au lieu de « détecter, alerter, attendre la réponse humaine », la séquence devient « détecter, évaluer les conditions, exécuter la réponse ». Les quatre modèles ci-dessous mettent en œuvre ce schéma pour les défis les plus courants liés à la localisation.
Modèle 1 : Limite de vitesse dans la zone
Le modèle de limite de vitesse dans la zone répond à un problème précis : faire respecter différentes limitations de vitesse dans des zones définies. Une limite de 60 km/h sur les routes publiques peut être sûre, mais la même vitesse dans une zone de chargement avec des piétons ou dans une zone résidentielle de livraison crée un risque.
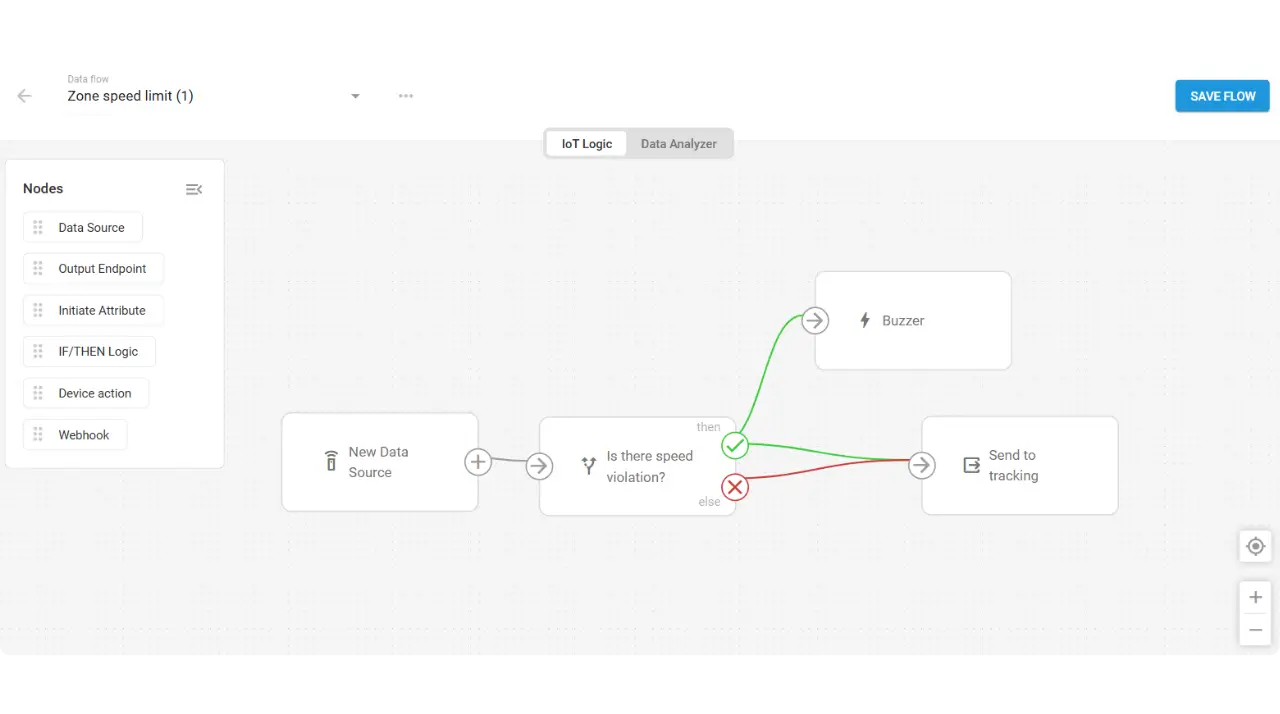
Le modèle utilise une vérification continue des conditions. Il surveille si le véhicule se trouve à l’intérieur de la géofence désignée ET si la vitesse dépasse le seuil. Les deux conditions doivent être vraies. Lorsqu’elles le sont, deux choses se produisent simultanément : l’appareil déclenche la sortie 1 (généralement un avertisseur sonore), fournissant un retour immédiat au conducteur, et l’événement est enregistré dans l’historique de suivi.
Dans les secteurs minier et industriel lourd, cela permet de faire respecter les limites de vitesse dans les zones de chargement et les zones où le personnel circule, où la visibilité est limitée et où les distances de freinage sont importantes. Dans la logistique et la livraison du dernier kilomètre, cela fournit une preuve de conformité pour les zones de livraison résidentielles où les clients et les piétons partagent l’espace.
Le modèle est configurable. Le seuil de vitesse, la géofence ciblée et l’action de sortie peuvent tous être ajustés en fonction des exigences opérationnelles spécifiques.
Modèle 2 : Stationnement hors site en dehors des heures d’ouverture
Ce modèle associe la prise en compte de la localisation et du temps pour traiter deux problèmes connexes : la prévention du vol et l’utilisation personnelle non autorisée des actifs de l’entreprise.
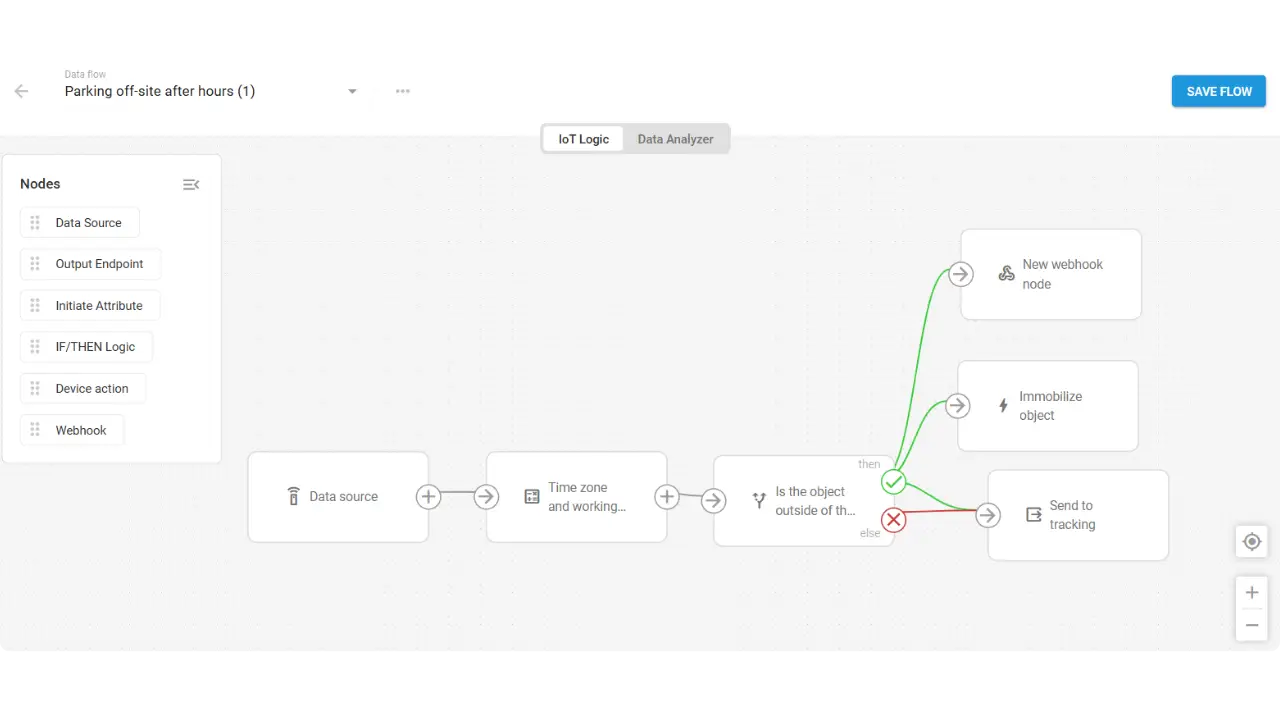
La logique intègre le fuseau horaire et les horaires de travail. La configuration par défaut utilise des horaires de 9 h à 21 h en UTC+2, mais ces paramètres sont ajustables. Le modèle vérifie ensuite une condition composée : le véhicule se trouve-t-il en dehors de la géofence de stationnement désignée ET l’heure actuelle est-elle en dehors des heures de travail ou un week-end ?
Lorsque les deux conditions sont remplies, la réponse est double. D’abord, une notification webhook est envoyée au point de terminaison configuré. Le modèle inclut une intégration Telegram à titre d’exemple, mais tout système compatible avec les webhooks fonctionne. Ensuite, la sortie 2 s’active, généralement connectée à un immobilisateur.
Pour les opérations de construction, cela signifie que les machines ne peuvent pas quitter le site pendant la nuit ou le week-end sans déclencher à la fois une alerte et une réponse de protection. Pour les opérations de location de voitures ou les flottes d’entreprise, cela fait respecter les emplacements de stationnement autorisés en dehors des heures d’ouverture.
C’est le modèle le plus complexe d’un point de vue logique, mais l’interface sans code gère les calculs horaires et la combinaison des conditions sans nécessiter de script.
Modèle 3 : Détection de zone dangereuse
Certaines zones nécessitent une notification immédiate dès l’entrée, plutôt qu’une surveillance continue par la suite. Les zones restreintes dans les opérations pétrolières et gazières, les routes sujettes aux inondations, les chantiers actifs où les conditions changent rapidement.
Le modèle de détection de zone dangereuse utilise un déclencheur d’événement d’entrée plutôt qu’une surveillance continue. La fonction enterGeofence() se lance une seule fois au moment où la limite est franchie, et non de manière répétée pendant que le véhicule reste à l’intérieur.
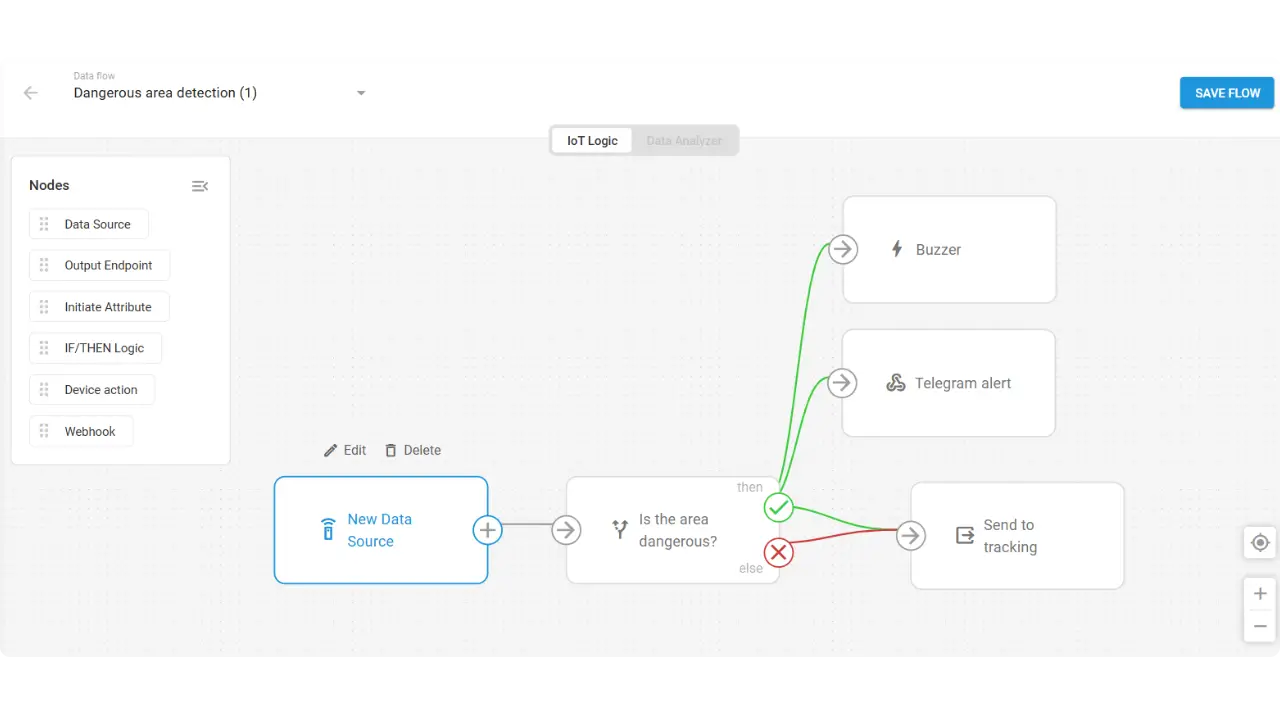
Lorsque l’entrée se produit, le modèle exécute trois actions en parallèle : la sortie 1 s’active (avertisseur sonore) pour alerter immédiatement le conducteur, une notification webhook est envoyée aux superviseurs ou aux responsables de la sécurité, et l’événement est enregistré dans le système de suivi. L’exécution en parallèle signifie qu’il n’y a pas de retard de séquençage. Le conducteur et le superviseur sont informés du franchissement de la limite au même moment.
Dans les opérations pétrolières et gazières, cela permet d’envoyer des alertes instantanées lorsque les véhicules approchent des zones restreintes à proximité de chantiers de forage ou d’installations de traitement actives. Dans les applications municipales et de ville intelligente, il peut avertir lorsque des véhicules entrent dans des routes fermées en raison d’inondations, d’accidents ou de conditions d’urgence.
L’approche par événement d’entrée évite le bruit d’alerte. Le système se déclenche une seule fois au franchissement, pas en continu pendant que le véhicule opère légalement à l’intérieur d’une zone autorisée.
Modèle 4 : Protection antivol
Avec des taux de récupération d’équipement inférieurs à 21 %, la prévention compte davantage que le suivi après coup. Le modèle antivol adopte une approche directe : lorsqu’un actif quitte une zone autorisée, arrêtez-le.
Le modèle utilise un déclencheur d’événement de sortie. La fonction _leaveGeofence()Italic se déclenche au moment où le véhicule franchit la limite de la zone autorisée. L’action est immédiate : la sortie 2 s’active, engageant l’immobilisateur.
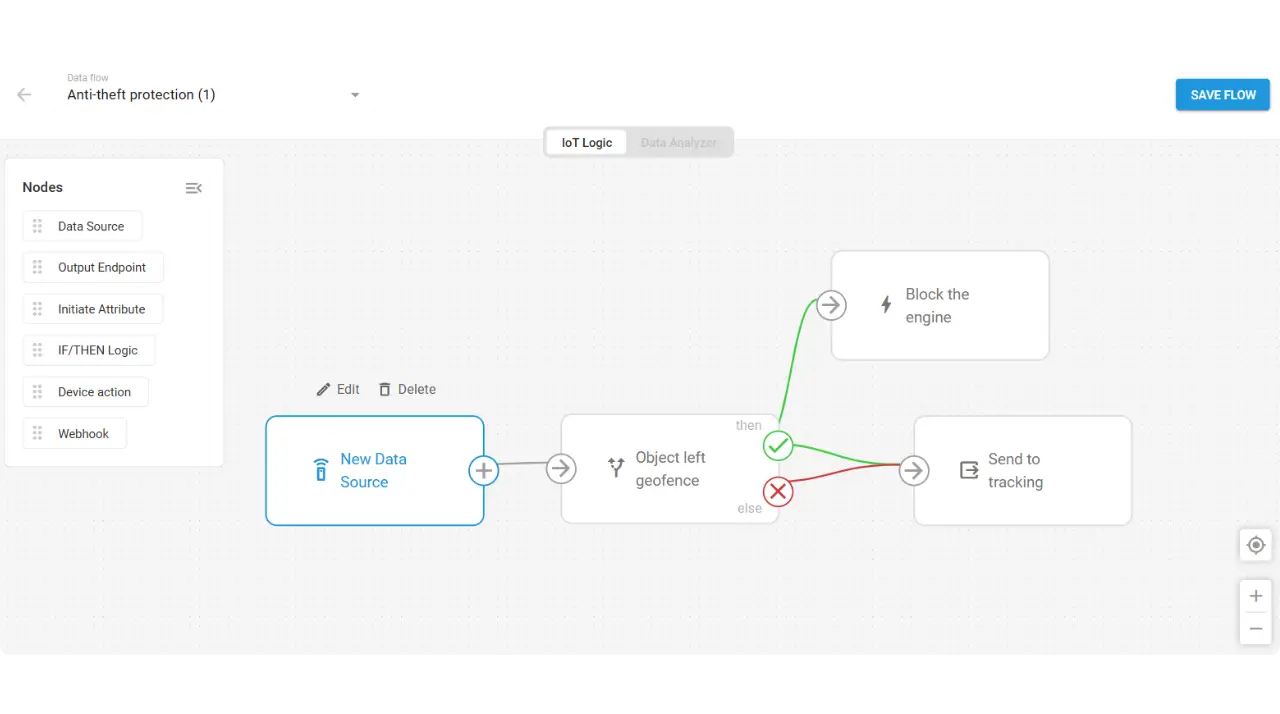
Voici un point de mise en œuvre crucial. Pour les véhicules pouvant être en mouvement au moment de la sortie, le modèle doit être associé à des appareils prenant en charge la coupure progressive du moteur. Les Teltonika FMB series avec SECO (Safe Engine Cut Off) en sont un exemple. Cela évite les arrêts soudains susceptibles de provoquer des accidents tout en garantissant que le véhicule ne peut pas aller bien loin au-delà de la limite.
Pour les concessions automobiles, cela empêche le retrait non autorisé d’un véhicule avant qu’il ne puisse s’éloigner du lot. Pour les opérations agricoles, où des équipements de grande valeur fonctionnent dans des champs éloignés avec une sécurité physique limitée, il offre une réponse de protection automatisée qui ne dépend pas d’une surveillance continue des alertes.
À la fois l’événement de sortie et le flux normal des données sont enregistrés, assurant un historique complet, que la condition de vol soit déclenchée ou non.
L’automatisation de flotte basée sur la localisation au-delà des alertes basiques
Alors, voici ce que nous avons. Le géorepérage établit à quoi ressemble la normalité. L’automatisation fournit la réponse lorsque les limites sont franchies. Les modèles éliminent l’interprétation humaine et les étapes manuelles qui entraînent des retards de réponse.
Pour les opérateurs de flotte, cela signifie une protection qui ne dépend pas de la surveillance d’alertes. Les modèles résolvent les problèmes les plus courants liés à la localisation, de la conformité de vitesse à la prévention du vol, sans nécessiter de développement personnalisé ou de ressources techniques.
Pour les PST (prestataires de services de télématique) qui développent des offres de services, l’automatisation basée sur la localisation constitue un facteur de différenciation que vous pouvez proposer pour des secteurs spécifiques. Les clients du BTP, les sociétés de location, les exploitants pétroliers et gaziers, et les flottes municipales ont tous des exigences dépendant de la localisation. L’automatisation télématique low-code vous permet de créer des solutions adaptées à leurs opérations sans repartir de zéro à chaque fois.
Les modèles servent de point de départ. Personnalisez les seuils, les zones, les actions et les points de notification pour répondre aux besoins opérationnels spécifiques. Explorez les modèles IoT Logic et commencez à élaborer des automatisations basées sur la localisation pour votre flotte.
Réserver une démonstration pour découvrir comment ces modèles d’automatisation de géorepérage peuvent fonctionner pour vos opérations, ou dites-nous quel type de flux de travail vous souhaitez automatiser et nous vous aiderons à le concevoir.