Quatro maneiras de melhorar as operações com automação de frota baseada em localização

Suas geofences funcionam. Elas detectam cruzamentos de limites, registram entradas e saídas e enviam notificações. E então alguém precisa ler essa notificação, decidir se ela importa e descobrir o que fazer a respeito. A lacuna entre a detecção e a resposta é onde as operações perdem dinheiro.
Este artigo mostra quatro modelos prontos para uso que fecham essa lacuna automaticamente.
A realidade operacional de setores dependentes de localização
Construção, logística, petróleo e gás, frotas municipais e agricultura compartilham uma característica fundamental – a localização define o que é considerado normal. Uma escavadeira em um canteiro de obras às 10h está trabalhando. A mesma escavadeira saindo do local às 2h é um problema.
Os números tornam isso mais concreto. Nos EUA, mais de 11.000 furtos de equipamentos de construção são registrados anualmente, com a estimativa de que o número real seja de duas a três vezes maior. A taxa de recuperação fica abaixo de 21%, o que significa que a maior parte do equipamento roubado se perde definitivamente. No Reino Unido, o roubo em canteiros de obras custa à indústria mais de £1 bilhão por ano.
Mas o roubo é apenas uma categoria de risco dependente de localização. Considere uso não autorizado fora do horário comercial, em que o equipamento acumula horas de motor, consumo de combustível e desgaste sem gerar receita. Considere violações de velocidade em zonas onde pedestres trabalham junto a máquinas pesadas. Considere veículos entrando em áreas restritas próximas a operações de perfuração ativas ou estradas sujeitas a inundações.
Esses não são problemas de monitoramento. Os gestores de frotas usam geofences há anos. O desafio é que os alertas exigem interpretação humana, priorização manual e reação. Uma notificação às 3h sobre equipamento saindo de um local não impede o equipamento de sair.
Como o geofencing de frota cria contexto operacional
O geofencing define os limites operacionais do comportamento normal. Uma zona de entrega, o perímetro de um canteiro de obras, uma área restrita, um local de estacionamento designado. Cada limite representa uma decisão sobre o que deve acontecer em cada lugar.
Alertas padrão de geofence informam quando esses limites são cruzados: entrada, saída, tempo de permanência. Essas informações são valiosas, pois criam um registro operacional e possibilitam análise.
A limitação é estrutural. Um alerta é informação, não ação. Ele exige que alguém o receba, avalie e decida o que fazer. Durante o horário comercial, isso pode funcionar. Durante horários fora do expediente, fins de semana ou períodos de alto volume, em que dezenas de alertas competem por atenção, a lacuna entre detecção e resposta se amplia.
O geofencing leva você até a metade do caminho. A pergunta é o que acontece depois que o limite é cruzado.
Automação de geofencing com IoT Logic
IoT Logic é a ferramenta de automação sem código da Navixy que permite criar regras conectando eventos telemáticos a comandos de dispositivo, notificações e sistemas externos. A adição recente de geozones como parâmetros significa que o contexto de localização agora flui diretamente para a lógica de automação.
O mecanismo funciona assim: um evento de localização (entrada, saída, posição dentro de uma zona) aciona uma verificação de condição. Se as condições forem atendidas, o sistema executa ações automaticamente. Essas ações podem incluir ativar saídas do dispositivo (buzzers, imobilizadores), enviar notificações webhook para sistemas externos e registrar eventos no histórico de rastreamento.
Isso altera o modelo operacional. Em vez de "detectar, alertar, aguardar a resposta humana", a sequência se torna "detectar, avaliar condições, executar a resposta". Os quatro modelos abaixo implementam esse padrão para os desafios mais comuns dependentes de localização.
Modelo 1: Limite de velocidade na zona
O modelo de limite de velocidade na zona aborda um problema específico: fazer cumprir diferentes regras de velocidade em áreas definidas. Um limite de 60 km/h em vias públicas pode ser seguro, mas essa mesma velocidade em uma zona de carregamento com pedestres ou em uma área residencial de entrega cria riscos.
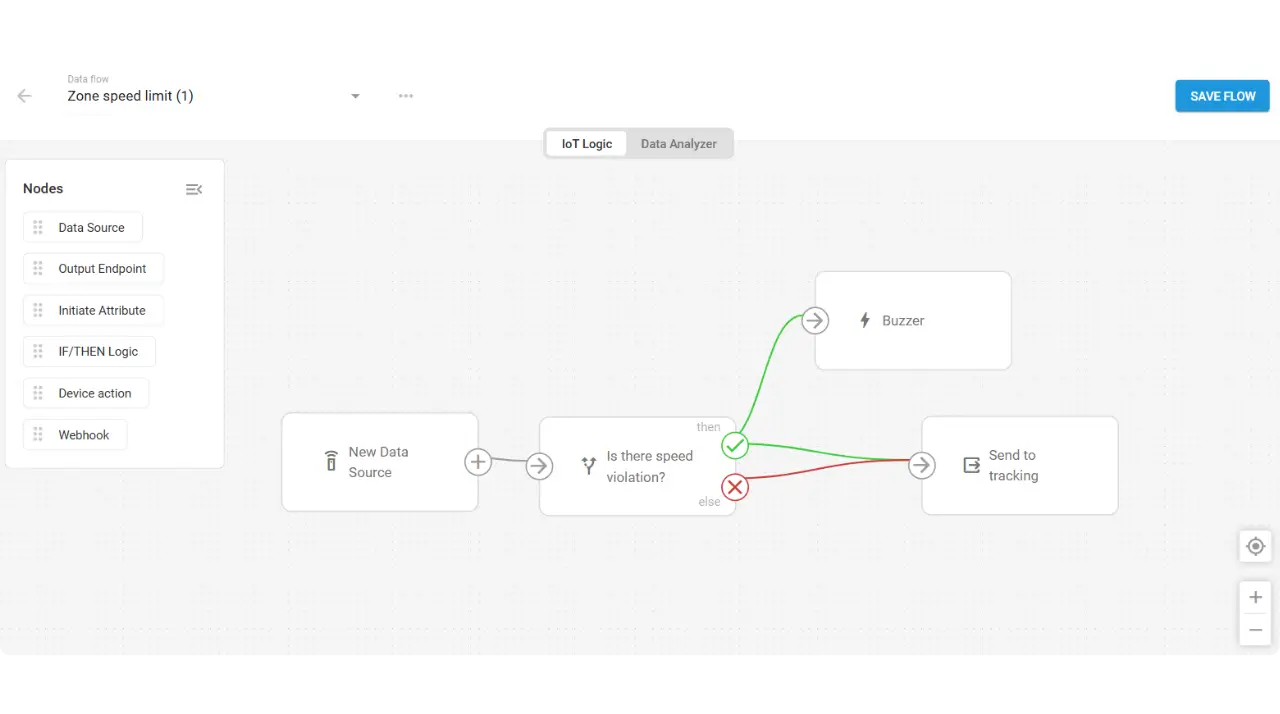
O modelo usa verificação de condição contínua. Ele monitora se o veículo está dentro da geofence designada E se a velocidade excede o limite. Ambas as condições devem ser verdadeiras. Quando são, duas coisas acontecem simultaneamente: o dispositivo aciona a saída 1 (normalmente um buzzer), dando feedback imediato ao motorista, e o evento é registrado no histórico de rastreamento.
Em mineração e indústria pesada, isso faz cumprir limites de velocidade em áreas de carregamento e lugares onde o deslocamento e a distância de frenagem são críticos. Em logística e entregas de última milha, fornece documentação de conformidade para áreas residenciais de entrega onde clientes e pedestres dividem o espaço.
O modelo é configurável. O limite de velocidade, a geofence-alvo e a ação de saída podem ser ajustados para requisitos operacionais específicos.
Modelo 2: Estacionamento fora do local após o expediente
Este modelo combina localização e percepção de tempo para resolver dois problemas relacionados: prevenção de roubo e uso pessoal não autorizado de ativos da empresa.
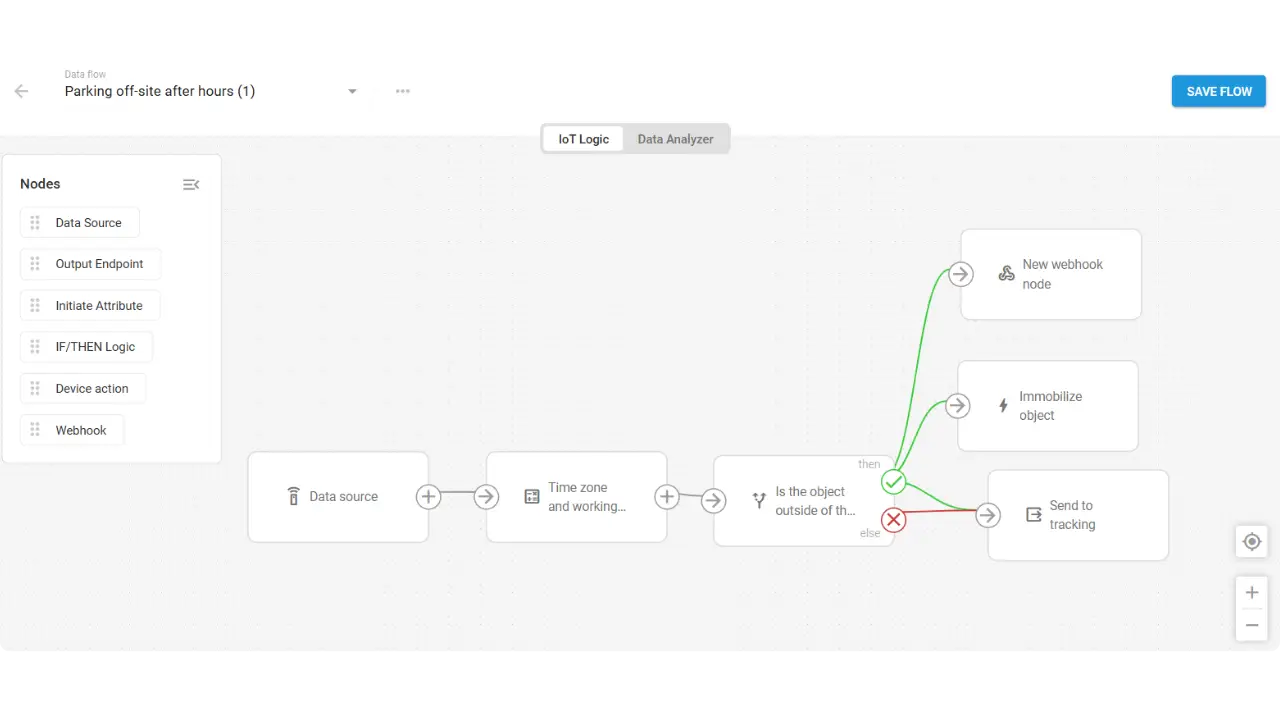
A lógica incorpora fuso horário e horário de trabalho. A configuração padrão usa 9:00 às 21:00 no UTC+2, mas esses parâmetros são ajustáveis. O modelo então verifica uma condição composta: o veículo está fora da geofence de estacionamento designada E o horário atual está fora do expediente OU é fim de semana?
Quando ambas as condições são atendidas, a resposta é dupla. Primeiro, uma notificação de webhook é enviada ao endpoint configurado. O modelo inclui integração com o Telegram como exemplo, mas qualquer sistema compatível com webhook funciona. Em segundo lugar, a saída 2 é ativada, normalmente conectada a um imobilizador.
Para operações de construção, isso significa que a máquina não pode sair do local durante a noite ou fins de semana sem gerar tanto um alerta quanto uma resposta de proteção. Para operações de locação de veículos ou frotas corporativas, isso faz cumprir locais de estacionamento autorizados fora do horário comercial.
Este é o modelo mais complexo em termos lógicos, mas a interface sem código lida com os cálculos de tempo e combinações de condições sem exigir scripts.
Modelo 3: Detecção de área perigosa
Algumas zonas exigem notificação imediata no momento de entrada, não monitoramento contínuo. Áreas restritas em operações de petróleo e gás, estradas sujeitas a inundações, zonas de construção ativas onde as condições mudam rapidamente.
O modelo de detecção de área perigosa usa um gatilho de evento de entrada em vez de monitoramento contínuo. A função enterGeofence() dispara uma única vez no momento em que a fronteira é cruzada, não repetidamente enquanto o veículo permanece dentro.
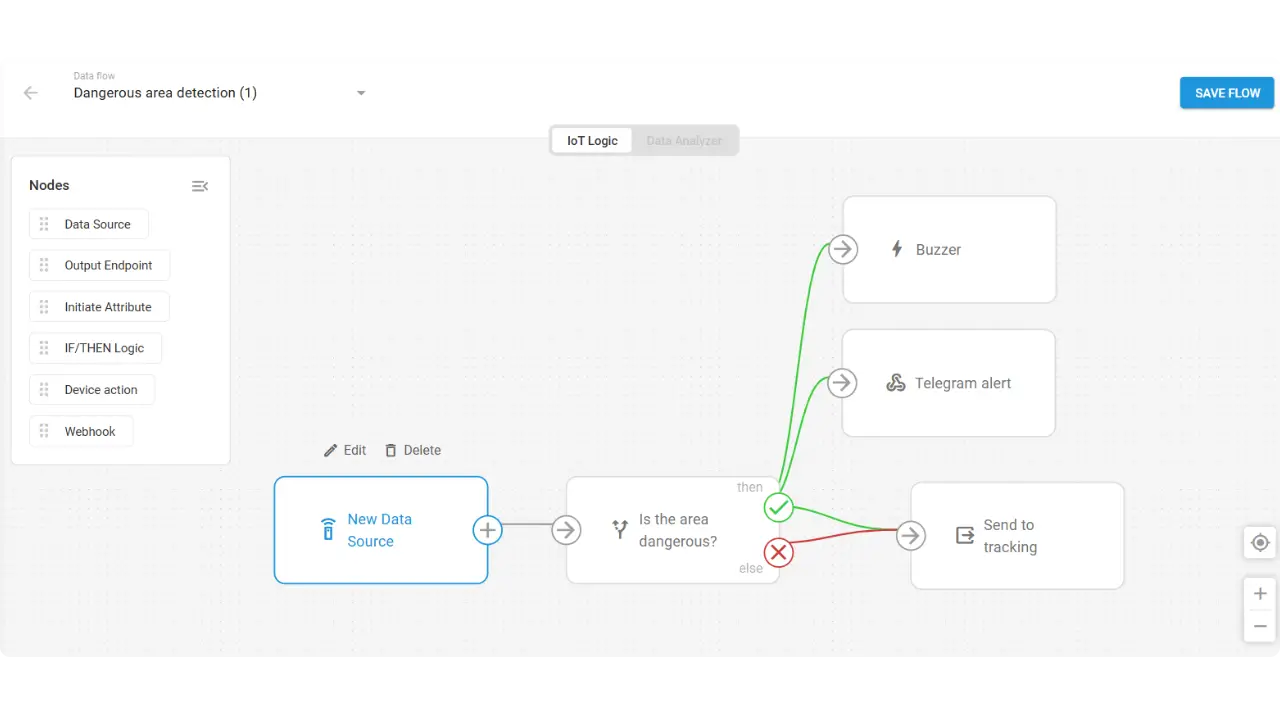
Quando a entrada ocorre, o modelo executa três ações em paralelo: a saída 1 é ativada (buzzer) para alertar imediatamente o motorista, uma notificação webhook é enviada a supervisores ou responsáveis pela segurança e o evento é registrado no sistema de rastreamento. A execução em paralelo significa que não há atrasos de sequência. O motorista e o supervisor ficam sabendo da violação ao mesmo tempo.
Em operações de petróleo e gás, isso fornece alertas instantâneos quando veículos se aproximam de zonas restritas próximas a equipamentos de perfuração ou processamento ativos. Em aplicações municipais e de cidades inteligentes, pode alertar quando veículos entram em estradas fechadas devido a inundações, acidentes ou condições de emergência.
A abordagem por evento de entrada evita ruído de alertas. O sistema dispara uma vez na travessia, não continuamente enquanto o veículo opera legitimamente dentro de uma zona permitida.
Modelo 4: Proteção contra roubo
Com taxas de recuperação de equipamento abaixo de 21%, a prevenção é mais importante do que o rastreamento após o fato. O modelo anti-roubo adota uma abordagem direta: quando um ativo sai de uma zona permitida, pare-o.
O modelo usa um gatilho de evento de saída. A função leaveGeofence() é acionada no momento em que o veículo cruza a área autorizada para fora. A ação é imediata: a saída 2 é ativada, acionando o imobilizador.
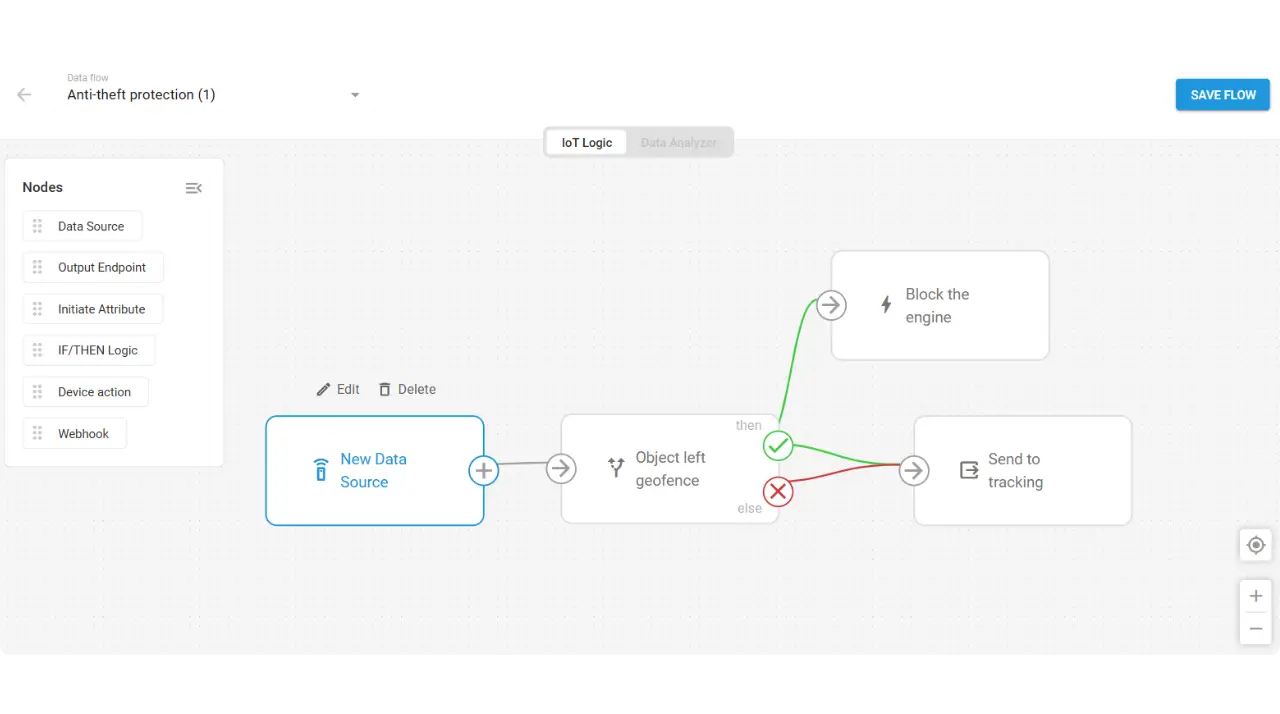
Aqui está uma observação importante de implementação. Para veículos que possam estar em movimento no momento da saída, o modelo deve ser combinado com dispositivos que suportem o corte gradual do motor. A série Teltonika FMB com SECO (Safe Engine Cut Off) é um exemplo. Isso evita paradas súbitas que poderiam causar acidentes, mas garante que o veículo não possa continuar muito além do limite.
Para concessionárias de automóveis, isso impede a remoção não autorizada do veículo antes que ele possa se distanciar muito. Para operações agrícolas em que equipamentos de alto valor operam em campos remotos com segurança física limitada, fornece uma resposta de proteção automatizada que não depende de alguém monitorando alertas.
Tanto o evento de saída quanto o fluxo normal de dados vão para o rastreamento, garantindo um registro completo, independentemente de a condição de roubo ter sido acionada.
Automação de frota baseada em localização além de alertas básicos
Então, aqui está o que temos. O geofencing estabelece como é o normal. A automação fornece a resposta quando os limites são cruzados. Os modelos removem a interpretação humana e as etapas de ação manual que criam atrasos na resposta.
Para operadores de frota, isso significa proteção que não depende de alguém observando alertas. Os modelos resolvem os problemas mais comuns dependentes de localização, desde conformidade de velocidade até prevenção de roubo, sem exigir desenvolvimento personalizado ou recursos técnicos.
Para TSPs que desenvolvem ofertas de serviços, a automação baseada em localização representa um diferencial que pode ser estruturado para setores específicos. Empresas de construção, locadoras, operadores de petróleo e gás e frotas municipais têm todos requisitos dependentes de localização. A automação low-code de telemática permite criar soluções personalizadas para suas operações sem precisar começar do zero a cada vez.
Os modelos são pontos de partida. Personalize limites, zonas, ações e endpoints de notificação para necessidades operacionais específicas. Explore modelos IoT Logic e comece a criar automações baseadas em localização para sua frota.
Agende uma demonstração para ver como esses modelos de automação de geofencing podem funcionar para suas operações, ou conte-nos qual tipo de fluxo de trabalho você deseja automatizar e nós o ajudaremos a projetá-lo.